Модель фазометрического формирования гониометрических сигналов акселерометров
Применение фазовых методов измерений основано на регистрации разности фаз гармонических колебаний [62]. В таком случае, функциональные зависимости описываются в виде векторной модели колебательного движения (рисунок 9).
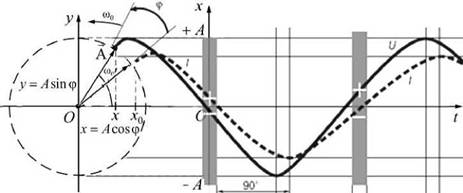
Рисунок 9 - Векторная модель колебательного движения
Так как фаза - это величина, описывающая колебательный процесс, и представляющая собой аргумент синусоидальной функции времени, то при наличии двух гармонических сигналов и
и
 с разными частотами разность фаз является линейной временной функцией и определяется из выражения:
с разными частотами разность фаз является линейной временной функцией и определяется из выражения:

В физическом смысле, разность фаз - это разность моментов времени, при которых фазы каждого из колебаний равны. Например, выражение для разности фаз двух колебаний напряжения, переходящих через нуль, можно выразить на основе разности моментов времени ti, t.+1и с учетом равенства мгновенных фаз:

В этом случае, ключевой характеристикой выступает время задержки:
46

Разработанный в рамках диссертационной работы метод гониометрического контроля основан на обработке сигналов акселерометров с применением вариации компенсационного фазового метода. Суть компенсационного метода, в данном случае, представляет собой наличие опорного (идеального) гармонического сигнала, сравнение с которым позволяет определить фазовый сдвиг ∆φi(рисунок 10).
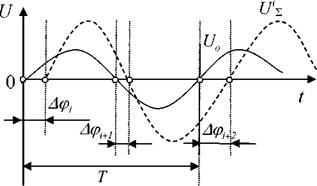
Рисунок 10 - Диаграмма компенсационного фазового метода
Фазометрический метод гониометрического контроля заключается в преобразовании выходных сигалов акселерометрических преобразолвателей в фазу гармонического колебания путем умножения выходных сигналов каждой из осей акселерометров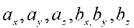 на фазо-квадратурные сигналы siιwπ∕ и
на фазо-квадратурные сигналы siιwπ∕ и
cos∙ ωtквадратурного генератора (КГ), характеризуемые частотой, кратной частоте опорного генератора (ОГ) системы (рисунок 11) [63].
Следует отметить, что при гониометрических измерениях на основе акселерометрических преобразователей, необходимо учитывать частный случай, когда датчик закреплен на объекте контроля, совершающем свободное падение. Так как измеряемым параметром акселерометра является кажущее ускорение (проекция вектора ускорения), то при совершении свободного падения, проекция кажущего ускорения совпадает по направлению с вектором ускорения свободного
падения. В таком случае, на выходе акселерометрического преобразователя будут
нулевые значения.
Рисунок 11 - Модель фазометрического формирования гониометрических
сигналов акселерометров
Решением этой проблемы и преобразованием пропорционального ускорению сигнала в сигналы, пропорциональные скорости и смещению является операция интегрирования на выходе преобразователей:

где к - коэффициент погрешности, вычисляемый для каждого i-акселерометра
В таком случае, основным недостатком является накопление ошибки за счет вычисления скорости на базе алгоритма интегрирования ускорения. Это приводит к преобразованию ошибки измерения ускорения в мультипликативную ошибку скорости.
Этот процесс периодичен и имеет обратную вязь по ускорению свободного падения: период нарастания ошибки был определен в качестве постоянной величины (постоянная Шулера) и равен 84 минуты для тел, находящихся под действием гравитационной силы Земли. Следует отметить, что для процессов, характеризующихся высокой динамикой изменения угловых параметров, данный диапазон нарастания ошибки является значительным. Кроме того, накопление множества малых погрешностей измерения ведет к росту амплитуды их колебаний.Отличительной особенностью разрабатываемого фазометрического метода гониометрического контроля является использование на амплитудной, а фазовой составляющей сигнала в качестве информативного параметра [64]. Кроме того, накопление ошибки можно компенсировать вычитанием её среднего значения из результирующих сигналов.
Далее рассмотрим математическую реализацию фазометрического метода для определения гониометрических углов в трёх плоскостях вращения:
- угол ∆αлежит в плоскости XOYи определяется на базе ax, ay, bx, byкомпонент вектора общего ускорения (рисунок 12).
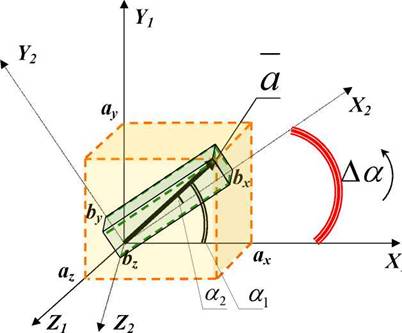
Рисунок 12 - Геометрическая модель вычисления угла ∆αвзаимного поворота акселерометра aотносительно акселерометра b
Следуя положениям фазометрического метода, умножим значения ускорений на сигналы опорного генератора [65]. Основным условием
на сигналы опорного генератора [65]. Основным условием
функционирования фазового метода изменений является наличие синусной и косинусной составляющей, характеризуемых разностью фаз, равной π∕2. В случае рассмотрения сигналов ускорения, находящихся в одной плоскости измерений, вычисление угла осуществляется умножением сигналов на синус и косинус, соответственно. Тогда сигналы примут вид:
49

В результате суммирования получим:

Далее, в результате фазового детектирования сигнал примет вид:

После низкочастотной фильтрации получим выражение, из которого легко можно вычислить фазу сигнала, пропорциональную углу поворота:

- угол ∆βопределяется компонентами вектора ay, az, by, bzускорения и лежит в плоскости YOZ.
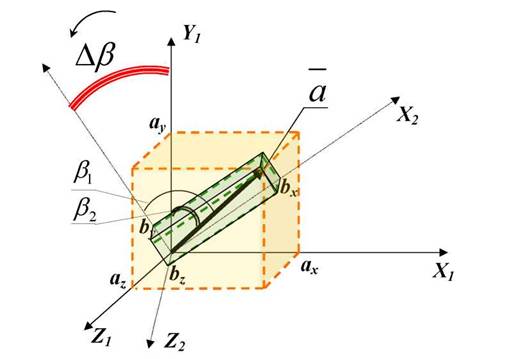
Рисунок 13 - Геометрическая модель вычисления угла ∆βвзаимного поворота акселерометра aотносительно акселерометра b
Аналогично, значение компонент ускорения ay, az, by, bz,для вычисления угла перемножаются на сигналы фазово-квадратурного (опорного) генератора (ФКС):
В результате суммирования получим:

Далее в результате фазового детектирования сигнал примет вид:

После низкочастотной фильтрации получим выражение, из которого легко можно вычислить фазу сигнала, пропорциональную углу поворота:

- угол А/ , определяемый компонентами ax az bx bzнаходящимися в плоскости измерений XOZ.
Очевидно, что при вычислении данного угла поворота, необходимо заново умножить зарегистрированные ранее сигналы ускорений на фазово-квадратурные сигналы, с тем условием, что, к примеру, компонента az, умножаемая на cose.)tв случае вычисления угла Aβ,будет умножена на сигнал sin ωt. Это обеспечивает основное условие фазового метода измерений - наличие сдвига фазы, равного π∕2. Следовательно, умножив значения ускорений ax az bx bz,получим:

И, осуществив операцию суммирования, получим: 
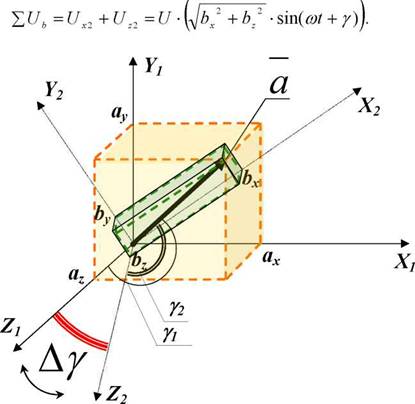
Рисунок 14 - Геометрическая модель вычисления угла Δ∕взаимного поворота акселерометра а относительно акселерометра b
Далее, в результате фазового детектирования, сигнал примет вид:

После низкочастотной фильтрации получим выражение, из которого легко можно вычислить фазу сигнала, пропорциональную углу поворота:

2.2
Еще по теме Модель фазометрического формирования гониометрических сигналов акселерометров:
- Исследование и моделирование процессов фазометрического формирования гониометрических сигналов акселерометров
- Алгоритмическая реализация моделей обработки данных в системе гониометрического контроля на базе фазометрического метода
- Подсистема адаптации гониометрической модели
- Исследование и разработка модели обработки информации при гониометрическом контроле
- Построение угловой модели и исследование достоверности гониометрического контроля
- Разработка алгоритма регистрации угловых перемещений на основе фазометрического метода
- Визуализация данных гониометрического контроля
- 3.3. Модель формирования конфликтологической культуры специалиста
- Модель формирования прибыли
- Модели управления персоналом. Проблемы формирования российской модели управления персоналом.