Визуализация данных гониометрического контроля
На основании данных об ускорениях, которое имеет каждое звено скелета человека в определенный момент времени, предлагается проектировать динамическую гониометрическую модель биомеханики [163-165].
Цифровые данные с акселерометров поступают в блок программной обработки сигналов, где, на основе алгоритмов фазометрического метода, осуществляется вычисление пространственных углов взаимного наклона звеньев [166,167]. При этом, объединяя данные каждого i-звена модели, формируется комплексная гониометрическая визуальная модель биомеханики (рисунок 57). Данная модель позволит визуализировать исследуемые суставные соединения пропорционально реальному размеру конечности.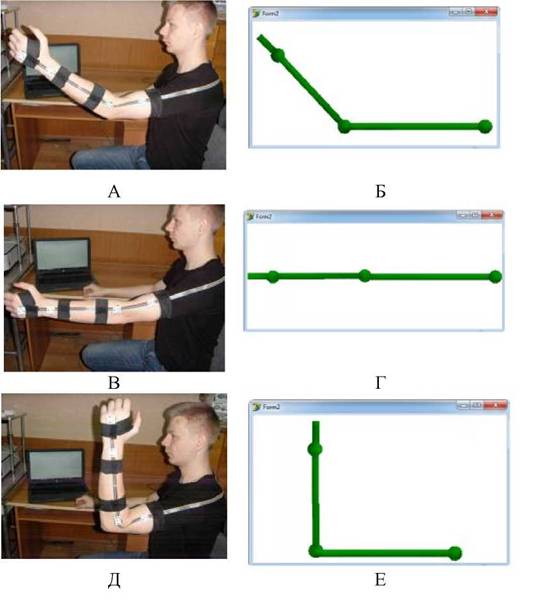

Рисунок 57 - Визуальная модель биомеханики левой руки на основе данных акселерометрических гониометров.
На рисунке 57 представлен процесс выполнения двигательного действия и его программная визуализация. а) Движение 1 - Сгибание руки в локтевом суставе с фиксированием плечевого сустава, гониометрический угол равен 31012,. б) Программная визуализация движения 1. в) Движение 2 - разгибание руки в локтевом суставе с фиксированием плечевого сустава, гониометрический угол равен 0o52,. г) Программная визуализация движения 2. д) Движение 3 - сгибание руки в локтевом суставе с фиксированием плечевого сустава, гониометрический угол равен 88’1. е) Программная визуализация движения 3. ж) Движение 4 - разгибание руки в локтевом суставе с отсутствием фиксации плечевого сустава, гониометрический угол равен 43°95’. г) Программная визуализация движения 4.
4.4.3
Еще по теме Визуализация данных гониометрического контроля:
- Алгоритм сбора и передачи данных системы гониометрического контроля
- Алгоритмическая реализация моделей обработки данных в системе гониометрического контроля на базе фазометрического метода
- Регистрация гониометрических данных
- Анализ информационно-технического и методологического обеспечения гониометрического контроля
- Методы гониометрического контроля
- Применение системы гониометрического контроля при геотехническом мониторинге и результаты исследования
- Анализ особенностей процесса организации гониометрического контроля и сфер его применения
- Методы позиционирования и калибровки систем гониометрического контроля
- Исследование и разработка модели обработки информации при гониометрическом контроле
- Построение угловой модели и исследование достоверности гониометрического контроля
- Анализ методов гониометрического контроля на базе акселерометрических преобразователей
- Техническая реализация системы гониометрического контроля