Оценка отклонений гониометрических параметров от нормы
Перспективами применения разработанного метода гониометрического контроля на базе акселерометрических преобразователей в области медицины является решение задачи эффективной автоматизированной диагностики с целью повышения качества реабилитационного процесса.
В связи с этим, вопросу интеграции результатов регистрации угловых перемещений на базе системы гониометрического контроля в системы автоматизированной обработки данных автором данной диссертационной работы посвящен ряд научных трудов [162, 168]. Следует отметить, что в качестве дополнительных информационныхметодов, для повышения качества диагностики можно привлекать регистрацию шума, возникающего в результате суставного трения [169,170], а также данные ЭЭГ и ЭМГ.
Применение нейросетевой обработки в качестве инструмента классификации двигательных действий является перспективным и развивающимся направлением. Для обучения нейронной сети, созданной на базе алгоритмов, описанных в п. 3.2 данной диссертационной работы, использовались данные системы гониометрического контроля и набор данных шаблонов движений в норме, полученный исследователями на базе Стендфордского университета [171]. Данный набор содержит временные ряды координат суставов человека во время движения.
Входными данными для обучения нейронной сети были выбраны временные ряды движения кисти руки при выполнении упражнения - вращение вокруг оси. Это обусловлено характерно быстрой динамикой суставного угла в процессе выполнения данного упражнения. График изменения суставного угла кисти руки представлен на рисунке 58.

Рисунок 58 - Временные ряды смещения кисти руки в пространстве
Для решения задачи классификации гониометрической динамики была разработана нейросетевая модель. Размер обучающей выборки составил 21 шаблон двигательного действия, каждый из которых являлся вектором размерностью 1x9000 и значениями координат на отрезке (-1; 1).
Применяемая нейросеть включала в себя два слоя: слой видимых нейронов, состоящий из 9000 элементов, и слой скрытых нейронов, количество которых подстраивалось во время процесса обучения.
Количество нейронов первого слоя нейросети обусловлено количеством значений первого входного вектора, содержащего координаты движения кисти руки. Данный вектор был нормирован в соответствии с нулевым математическим ожиданием и единичной дисперсией. В ходе обучения нейронной сети рассматривалась ошибка (cross entropy) как расстояние между распределением входного вектора v0и распределением «восстановленного» v1движения.
Рисунок 59- Ошибка нейронной сети при 3000 тренировочных итераций

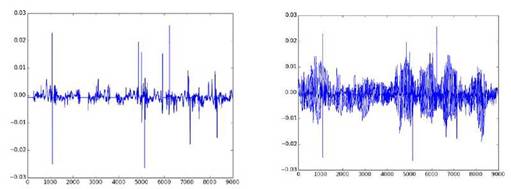
Рисунок 60 - Графики обучения нейронной сети. Слева - временной ряд обучающего набора данных, справа выход нейронной сети.
В ходе обучения нейронной сети была осуществлена классификация движения человека, результаты которой приведены на рисунке 60. Развитие и дальнейшее применение данного подхода при гониометрическом контроле обладает перспективами с точки зрения возможности прогнозирования гониометрического состояния объектов, а также предупреждения развития нежелательных гониометрических изменений.
Еще по теме Оценка отклонений гониометрических параметров от нормы:
- Оценка точности регистрации угловых параметров на базе разработанного метода гониометрического контроля
- 3.2 Разработка нейросетевых алгоритмов обнаружения и классификации гониометрических параметров
- Мотивированные отклонения ОТ НОРМЫ
- Отклонения от нормы (аномальность)
- Методы оценки и прогнозирования гониометрического состояния объекта контроля
- Интервальные оценки параметров распределения
- Статистические оценки параметров распределения
- Точечные оценки параметров
- Точечные оценки параметров распределения
- §12. Оценки параметров распределения
- 4.1.1. Оценка значимости параметров уравнений регрессии
- 3.6. Аппаратурная реализация системы для оценки и нормализации параметров микроклимата
- 2.10. Интервальные оценки параметров квадратичной линии регрессии генеральной совокупности
- 38. Понятие «геополитика». Основные параметры оценки геополитической обстановки.
- Критерии оценки социальной нормы.