3.2 Разработка нейросетевых алгоритмов обнаружения и классификации гониометрических параметров
Разработанная в п. 2.2 диссертационной работы модель обработки информации включает в себя модуль классификатора динамических моеделей и модуль выявления нарушений (оценки), для реализации которых были разработаны нейросетевые алгоритмы.
В параметрах гониометрических сигналов контролю i-звена подлежат два признака: угол наклона в пространстве zvi(признак 1) и скорость его изменения zvi(t)(признак 2). Оценивая принадлежность контролируемых величин параметрам нормы для определенного класса движений объекта контроля, пространство движений разбивается на области, количество которых равно количеству возможных классов движений объекта контроля.
Задача алгоритма нейросетевого классификатора движений по начальной выборке измеренных гониометрических данных определить за время ∆tвид движения, путем установления степени принадлежности временного ряда динамики углов каждого из звеньев модели в пространстве к временному ряду, описывающему динамику угловых параметров характерных для определенного вида движения (крен, сгибание, излом, наклон и т.д.).
Использование нейросетевого подхода в решении задач классификации и обнаружения движений сопровождается рядом аспектов [109]:
1. Для обнаружения двигательного действия необходимо привести в соответствие временные ряды гониометрических данных. Эта задача возникает в
связи с индивидуальными особенностями объекта контроля, которые характеризуются различным временем (скоростью) выполнения одного и того же двигательного действия или перемещения. Для временного соответствия сигналов предлагается применять метод компенсации временной задержи, путем деления на коэффициенты скорости, рассчитанные на основе регистрируемого ускорения, являющегося информативным сигналом разработанного метода контроля. Так как движение контролируемого объекта является неравномерным, коэффициенты скорости необходимо получать из значения средней скорости, равной и представляющей собой векторную величину, значений которой объект контроля достигает на периоде измерений
и представляющей собой векторную величину, значений которой объект контроля достигает на периоде измерений
2.
Для обеспечения высокой надежности классификации, необходимым условием является выбор оптимального количества измерений, используемых для обучающей выборки нейронной сети.3. Исходя из критерия минимизации, необходимым является подбор оптимальной размерности входного пространства для обучения нейронной сети.
4. Для задачи с вещественными значениями рекомендуется нормализовать все тренировочные данные перед началом обучения так, чтобы они имели нулевое математическое ожидание и единичную дисперсию [110]. Это позволит избежать проблем медленного обучения, переобучаемости и низкого качества классификации.
Для решения задач классификации сигналов разработано и активно применяется множество нейросетевых моделей, описанию применения которых посвящены работы [82, 109-111]. Так, например, в работе [111] рассмотрена классификация движений человека на основе модели нейросети, называемой ограниченной машиной Больцмана (Restricted Boltzmann machine). В связи с этим, обосновано выбрать данную модель для решения задач классификации движений в рамках диссертационной работы. Условием выбора данной модели нейронной сети является возможность достижения глобального минимума ошибки. Другие модели нейронных сетей прерывают процесс обучения в случае достижения локального минимума. Особенностью выбранной модели нейронной сети
является то, что она является стохастической, т.е. весовые коэффициенты сети принимают случайные значения, либо функция активации нейрона является случайной функцией.
Кроме того, в подсистеме осуществляется оценка допустимой степени отклонения сегментов (оценка нормы) в текущий момент времени t.
Для оптимизации и повышения эффективности гониометрического контроля предлагается нейросетевая обработка данных. Выбор нейросетевого подхода в решении задачи прогнозирования оправдан теми фактами, что при практическом применении наиболее распространенных нейросетевых моделей ошибка прогноза не превышает 0,5 %, что соответствует прогнозу высокого качества.
Основным преимуществом разработанной нейронной сети является применение нечеткой логики и правил нечетких продукций (ПНП) [112 -114], позволяющих полностью описывать функционирование двигательной системы. Первостепенным этапом, посредством экспертного заключения, необходимо определить исходные значения используемых в ПНП параметров нормы и отклонения, для их дальнейшей корректировки с помощью нейросетевых технологий. Следовательно, необходимо сделать выбор в пользу ПНП, условия, которые выглядят следующим образом:
ЕСЛИ: «Отклонение 1 = истина» И «Отклонение 2 = истина»... И «Отклонение n = истина»
ТО: «Заключение 1 = истина» И «Заключение 2 = истина».
И «Заключение m = истина»
Функции принадлежности (ФП) μчеткой величины нечеткому терм- множеству, соответствующему одному из значений входных лингвистических переменных, которые выбираются с учетом статистической базы, могут быть получены в виде, показанном на рисунке 29. 
Рисунок 34 - Функция принадлежности терма. ВхЛП - входная лингвистическая переменная, ЛВ - лингвистический вывод
На рисунке 34 по оси абсцисс распределяются значения четкой переменной, i =1,g- номер эксперта, g- их количество. По оси ординат откладывается процентное соотношение μ мнения эксперта о степени принадлежности параметра xзначению конкретной лингвистической переменной (ЛП). В этом случае для линеаризации функции принадлежности целесообразно применить метод наименьших квадратов.
Условия, которые содержат более одного подусловия (фактора) необходимо объединять (агрегировать) в соответствие со следующим ПНП:

Каждое из nусловий ««ВхЛП = 3Hi1>>ИЛИ ... ИЛИ «ВхЛП,= 3ιl.>>состоит из mподусловий «ВхЛП,= Зн.», где Зн. - j-е значение i-й ЛП в подусловии. Его номер определяется номером значения входной ЛП: ij.Таким образом, для определения степени истинности μijвсех подусловий данного ПНП сформирована матрица М:

Применяя матрицу истинности подусловий, получаем формулу для расчета коэффициента χстепени надежности диагноза, расчет которого необходимо осуществить для каждого из возможных нарушений: 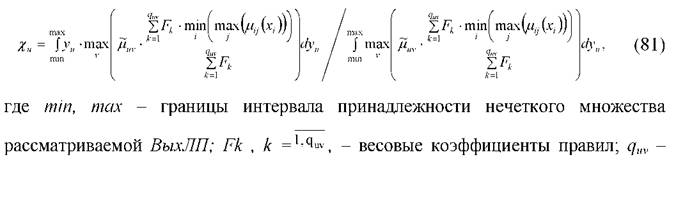
количество ПНП для определения ФП v -терма u-й исходная ФП
исходная ФП
v-го терма u -й ВыхЛП.
Основным недостатком такого подхода является необходимость учитывать и вести постоянный мониторинг появления новых факторов в зависимости от которых меняются веса ПНП [115].
Этот недостаток настройки ПНП позволяет компенсировать применение нечеткой логики в системе логического вывода при проектировании нейронной сети (рисунок 35). Структура нейронной сети представляет собой многослойную нейронную сеть, однако каждый из её слоев представляет собой один из этапов
нечеткого логического вывода.

Рисунок 35 - Алгоритм гибридной нейронной сети
На рисунке нейроны с обозначениями «mln», «max», «2» и «х»работают как соответствующие математические функции. Знаком
Еще по теме 3.2 Разработка нейросетевых алгоритмов обнаружения и классификации гониометрических параметров:
- Разработка алгоритма обнаружения наростов ракушечника на сооружениях
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- Оценка отклонений гониометрических параметров от нормы
- 1.3. Методы обнаружения сигналов с известными параметрами
- Оценка точности регистрации угловых параметров на базе разработанного метода гониометрического контроля
- Алгоритм сбора и передачи данных системы гониометрического контроля
- Исследование и разработка модели обработки информации при гониометрическом контроле
- Разработка и исследование метрологического обеспечения системы гониометрического контроля
- Алгоритм оптимизации ряда изделий с размерным параметром.
- Алгоритмы оптимизации ряда для изделия с силовым параметром
- 3.1.4 Разработка алгоритма виртуального позиционирования акселерометрических преобразователей
- 3.3 Аналитическое исследование чувствительности алгоритма к выбору параметра регуляризации
- Разработка алгоритма анализа массива ЯЭФП
- 2.3. Разработка методов классификации качества и пригодности технологических процессов 2.3.1. Дискриминантный анализ в задаче классификации с учетом коррелированности показателей
- 6.2. Алгоритм расчета параметров К‑модели.
- Разработка алгоритма настройки акселерометрических преобразователей
- Раздел 2. Разработка моделей и алгоритмов
- 3.2. Разработка функциональных преобразователей климатических параметров в электрический сигнал
- Разработка алгоритма регистрации угловых перемещений на основе фазометрического метода
- 3.1. Выбор и разработка датчиков для определения параметров микроклимата и внешних климатических условий