3.1.4 Разработка алгоритма виртуального позиционирования акселерометрических преобразователей
Предварительным этапом гониометрического контроля посредством разработанного фазометрического метода является установка акселерометров в
соответствии с компоновочной схемой, описанной в статьях [103-106], а также их дальнейшее позиционирование.
В рамках разработанного алгоритма виртуального позиционирования акселерометров необходимо ввести идеализированную математическую систему координат X X', спозиционированную с учетом ускорения свободного падения g (рисунок 30).
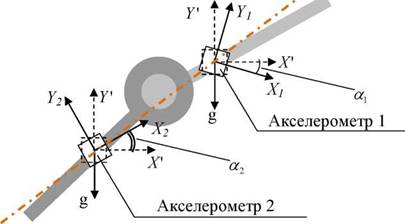
Рисунок 30 - Схема размещения акселерометров при позиционировании
По данному алгоритму крепление акселерометров на подвижных звеньях объекта контроля не предполагает соблюдения требований по установке осей чувствительности относительно базовой системы координат, принятой за систему отсчета. Иными словами, данный метод допускает первоначальное наличие углов рассогласования измерительных ветвей акселерометра относительно горизонтали. Следует отметить, что необходимым является установка одинаковой чувствительности измерений для каждого из акселерометров, входящих в измерительную цепь.
Сигналы акселерометров представляют собой проекции вектора ускорения свободного падения на соответствующие оси чувствительности OXи OY:

где axι,a- выходные сигналы /-го акселерометра по соответствующим осям чувствительности, g- постоянная ускорения свободного падения, ai- угол
осевого отклонения i-го акселерометра относительно базовой системы координат, принятой за систему отсчета.
Применив фазометрические преобразования, сигналы с акселерометров примут вид:
Далее, преобразуем выражения (56) и (57) с учетом (58) и (59):

Определение угла поворота возможно на основании суммирования полученных гармонических сигналов (60-61) по двум компонентам:

Далее, угол осевого отклонения акселерометра относительно базовой системы координат, принятой за систему отсчета, определяется путем регистрации разности фаз сигнала опорного генератора и
и
полученного суммированного сигнала .
.
зарегистрированный от момента перехода через ноль сигнала опорного генератора до момента перехода через ноль преобразованного суммированного сигнала акселерометров в выбранном периоде будет пропорционален углу ai осевого отклонения акселерометра относительно базовой системы координат.
Для перевода системы координат акселерометра в базовую систему координат (принятую за систему отсчета), введем матрицу, компонентами которой являются тригонометрические функции вычисления угла осевого отклонения акселерометра ai:
 I
I
Полученные углы aiнеобходимо умножить на матрицу перехода к новой системе координат (63):
85

Требуемые параметры ускорения, позволяющие скомпенсировать угол осевого отклонения aiакселерометра относительно базовой системы координат, определяются на основе выражений:

Рассмотрим пару акселерометров 1 и 2, закрепленных соосно на подвижных элементах кинематического звена с одной плоскостью вращения. Введем систему уравнений:
Выразим каждый параметр системы (67) через сигналы ускорений по каждой из компонент пары акселерометров:
Далее, осуществив подстановку параметров (68) в систему (67), получим следующую систему уравнений:

При решении системы уравнений (69), определим угол α осевого отклонения систем координат акселерометров:
На основании описанных выражений был разработан алгоритм виртуального позиционирования акселерометров, позволяющий программно
привести в соответствие расположение осей чувствительности акселерометров к осям горизонтальной системы координат XY'(рисунок 31).
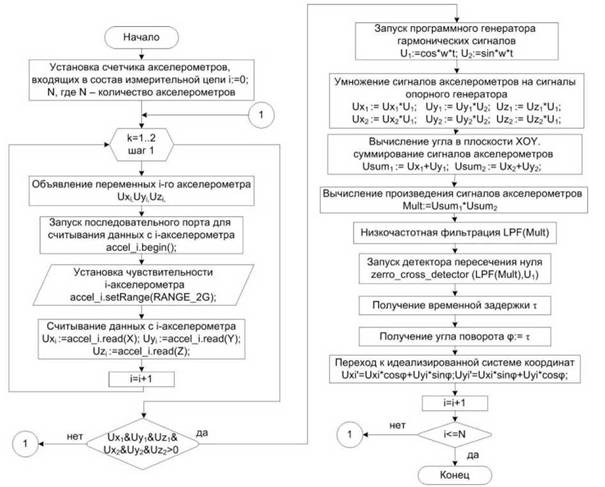
Рисунок 31 - Блок-схема алгоритма виртуального позиционирования осей чувствительности акселерометрических преобразователей
По данному алгоритму акселерометрическая система гониометрического контроля совершает автоматическое виртуальное позиционирование, пока объект контроля находится в статическом режиме. После начала позиционирования объект контроля должен совершить двигательные действия для придания акселерометрическим преобразователям ускорений. В случае контроля здания или сооружения для позиционирования необходимо создать искусственное вибрационное колебание (смещение стационарности акселерометров), осуществляемое путем механического воздействия на конструкцию сооружения (удар) либо с использованием естественного вибрационного фона от близлежащих транспортных систем (автодорога, железная дорога).
Данный алгоритм виртуального позиционирования позволяет решить вопрос компенсации погрешности, вызванной рассогласованием осей чувствительности элемента корпусу акселерометрического преобразователя: вследствие того, что позиционирование осуществляется на основании реальных измерений, расположением осей корпуса акселерометров можно пренебречь.
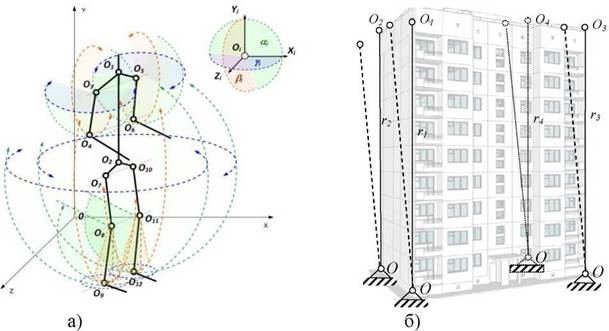
Рисунок 32 - Угловые модели объектов контроля
Следующим этапом позиционирования является определение расстояний между точками отсчета для построения угловой n-звенной модели объекта контроля. В случае если объектом контроля является тело человека, то n-звенная модель будет иметь вид, представленный на рисунке 32а [107], в случае, если объектом контроля является здание или сооружение, то модель примет вид, указанный на рисунке 32б [108].
Как видно из рисунков, каждая модель состоит из совокупности простых кинематических звеньев. Следовательно, если рассматривать каждое звено в отдельности, то траектория движения одной точки относительно другой будет описывать окружность с фиксированным радиусом, меняющую направление в пространстве (рисунок 33).
Исходя из этого предположения, формирование общей модели объекта контроля строится при последовательно-параллельном соединении каждого из отдельных звеньев.
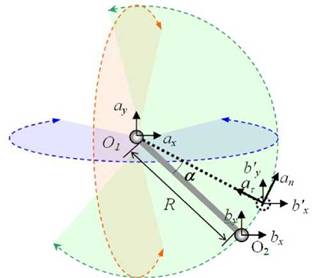
Рисунок 33 - Траектория движения звена
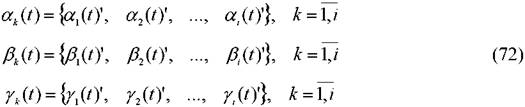
На основании положений классической механики, пространственное положение тела и его звеньев однозначно определяется длинами звеньев riи временной зависимостью углов взаимного поворота звеньев в пространстве, представленной в виде векторов:
Для определения длин звеньев, входящих в состав модели объекта, после установки и калибровки системы гониометрического контроля, объекту необходимо совершить движение, которое приведет к изменению межзвенных углов φtи ускорений каждого из акселерометров, входящих в состав измерительной цепи. При этом необходимо ввести в данную систему отсчета - неподвижный акселерометрический датчик, закрепленный соосно-базовой системе координат Земли на фиксированной поверхности. Следует отметить, что при рассмотрении многозвенного объекта, узел iпринимается за неподвижную точку отсчета для определения движения узла i+1, при этом узлы i и i+1 являются частями одного звена. Далее, при последовательном соединении звеньев, узел i+1 становится точкой отсчета для узла i+2, представляющих собой
новое звено. Эта последовательность продолжается для всех узлов, соединяющих звенья объекта контроля.
После того, как тело совершило двигательное действие, ускорение узла /+1 (точка В на рисунке 33) можно представить как разность:

где - ускорения точек А и В соответственно
- ускорения точек А и В соответственно -ускорение вращения.
-ускорение вращения.
В свою очередь, ускорение вращения раскладывается на две компоненты:

где - нормальная и тангенциальная составляющие, соответственно.
- нормальная и тангенциальная составляющие, соответственно.
Переходя от векторной величины, ускорение вращения примет вид:

В свою очередь:

где R-радиус окружности, -угловая скорость, φ- угол вращения,
-угловая скорость, φ- угол вращения,
определяемый на основании фазометрического метода.
Измеряемое общее значение ускорения A, можно получить из разности ускорений двух точек А и В:
При переходе от векторных величин, выражение общего ускорения примет вид:
Полученное выражение (78) позволяет рассчитать радиус окружности, описываемый каждым из n-звеньев, входящих в состав гониометрической модели

Еще по теме 3.1.4 Разработка алгоритма виртуального позиционирования акселерометрических преобразователей:
- Разработка алгоритма настройки акселерометрических преобразователей
- Анализ метрологических характеристик акселерометрических преобразователей
- Анализ методов гониометрического контроля на базе акселерометрических преобразователей
- Исследование процессов регистрации сигналов акселерометрических преобразователей
- 3.2. Разработка функциональных преобразователей климатических параметров в электрический сигнал
- Вторичные преобразователи, используемы для измерений сопротивления терморезистивных преобразователей.
- Разработка алгоритма регистрации угловых перемещений на основе фазометрического метода
- Разработка алгоритма анализа массива ЯЭФП
- 3.2 Разработка нейросетевых алгоритмов обнаружения и классификации гониометрических параметров
- Разработка алгоритма обнаружения наростов ракушечника на сооружениях
- Раздел 2. Разработка моделей и алгоритмов
- 4.1 Разработка алгоритма для реализации метрологического обеспечения контроля и диагностирования АТС.
- Глава 3 Разработка регуляризирующего алгоритма получения навигационной оценки на заданный момент времени
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- 2.3. Разработка методики оценки характеристик достоверности прн использовании алгоритмов диагностирования с учетом методической составляющей погрешности, погрешности измерения н дополнительной погрешности.
- 2.3. Школа позиционирования
- Позиционирование продукта
- в) Позиционирование