Анализ метрологических характеристик акселерометрических преобразователей
Согласно основным положениям метрологии, погрешность акселерометрических преобразователей классифицируется на случайную и систематическую. При этом причиной появления случайных погрешностей являются особенности аппаратной реализации, приводящие к наличию функциональных сбоев электронных компонентов, входящих в состав преобразователя.
Причиной возникновения погрешностей данного класса является сбои и нестабильность напряжения питания, шумы на выходе усилителей, особенности условий эксплуатации (тепловое и механическое воздействие). Систематическая погрешность, как правило, определяется наиболееточно в технической документации на конкретный акселерометрический преобразователь и является следствием воздействия технологических факторов и температурных возмущений при известных параметрах протекания тепловых процессов в конструкциях чувствительных элементов [50, 51].
На основе анализа цифровых акселерометров, наиболее распространенных на рынке измерительных акселерометрических преобразователей, был выявлен ряд погрешностей, влияющих на точность измерений и требующих учета при их практическом применении в гониометрических измерительных системах. В таблице 2 приведены погрешности, которые могут быть устранены при проведении калибровки.
Таблица 2 - Погрешности, устраняемые калибровкой
| Модель акселерометра | Погрешность нуля, mg | Приведённая погрешность нуля,% | Мультипликативная погрешность, % |
| MMA7450 | 250 | 3,2 | - |
| MMA7660 | 64 | 4 | 8 |
| MMA7455 | 330 | 4 | 10 |
| ADXL345 | 150 | 2-4 | 10 |
| SMB380 | 60 | 1 | - |
| LIS202DL | 40 | 2 | 10 |
| LSM303DLM | 60 | - | - |
| LIS331DLH | 50 | 1,7 | 7 |
При этом мультипликативная погрешность является проблемой, которая в традиционных датчиках решается за счет применения сложных компенсационных методов в устройствах формирования выходного сигнала измерительного преобразователя [50].
Следует заметить, что применение фазометрического принципа формирования сигнала позволяет полностью устранить мультипликативную погрешность акселерометрических преобразователей [51]. Особо следует выделить погрешность, вызываемую температурным режимом акселерометров (таблица 3).
Таблица 3 - Температурные погрешности акселерометров
| Модель акселерометра | Т емпературный дрейф нуля, mg∕°C | Температурная нестабильность коэффициента преобразования, %∕°C |
| MMA7660 | 1,5 | 0,01 |
| ADXL345 | 1 | 0,02 |
| SMB380 | 1 | - |
| LIS202DL | 0,5 | 0,01 |
| LSM303DLM | 0,5 | 0,01 |
| LIS331DLH | 0,6 | 0,01 |
Для учета температурного влияния в высокоточных акселерометрических датчиках применяется измерение температуры, с возможностью дальнейшего применения алгоритмов температурной коррекции [52, 53].
В таблице 4 приведены метрологические параметры акселерометров, которые определяют чувствительность датчика по оси измерений и боковую погрешность, определяемую шириной диаграммы направленности датчика.
Как видно из приведенных данных, наибольшим численным составляющим общей величины погрешности акселерометров является погрешность нуля и погрешность чувствительности - по 10% и 6%, а так же погрешность поперечной чувствительности (2...5%) и нелинейность акселерометра (0,5...2,5%). Также значимыми недостатками приведенных инерциальных датчиков является сравнительно низкая точность и зашумленность выходного сигнала дрейф смещения нуля [53].
Таблица 4 - Метрологические параметры акселерометров
| Модель акселерометра | Разрешение, mg | Боковая чувствительность, % | Нелинейность, % от FS |
| MMA7450 | 15,6 | 5 | 1 |
| MMA7660 | 21,33 | 1 | - |
| MMA7455 | 15,6 | 5 | 1 |
| ADXL345 | 3,9 | 1 | 0,5 |
| SMB380 | 4 | 2 | 0,5 |
| LIS202DL | 18 | 4 | - |
| LSM303DLM | 1 | - | - |
| LIS331DLH | 3,5 | 4,2 | 1 |
Следует выделить мультипликативные погрешности акселерометричесиккх преобразователей в качестве отдельного класса погрешностей, оказывающих основное влияние на стабильность измерительных ветвей преобразователя[54].
В теории погрешностей мультипликативная погрешность определяется как детерминированное систематическое отклонение показаний измерительного устройства, имеющее длительный период [55, 56]. Причинами возникновения мультипликативной погрешности являются, в основном, особенности условий среды эксплуатации (температурная нестабильность, нестабильность источника питающего напряжения и др.) [50].
При этом, мультипликативная составляющая погрешности измерений зависит как от величины проекции кажущегося ускорения на номинальную ось чувствительности акселерометра (погрешность масштабного коэффициента), так и от величины проекции кажущегося ускорения на плоскость, ортогональную оси чувствительности акселерометра (погрешность рассогласования осей).
В ходе анализа погрешностей, оказывающих наиболее существенное влияние на точностные показатели акселерометрических преобразователей, были выявлены следующие закономерности:
- рассматриваемые акселерометры имеют довольно существенную начальную погрешность нуля, требующую дополнительной калибровки (1-4%);
- имеется начальная погрешность чувствительности (8-10%);
- наличие боковой чувствительности (1-5%) означает, что при изменениях только по оси Х, также присутствует небольшое изменение по оси Y;
- наличие погрешности дискретизации (7-9,5%), возникающей в процессе преобразования и передачи данных.
В качестве решения задачи повышения устойчивости измерений к влиянию мультипликативных погрешностей нашли широкое применение компенсационные методы, суть которых заключается в применении источника переменного тока в устройствах формирования выходного сигнала акселерометра с последующим усилением выпрямленных выходных сигналов в усилителях
дифференциального типа. Повышение точности и устранение нестабильности в данном случае осуществляется посредством включения в измерительную цепь переменного компенсационного резистора, один из контактов которого соединен со входом одного из выпрямителей, другой - с дополнительным входом дифференциального усилителя [57].
В общем случае, рассматривая ветви измерительного преобразователя (оси чувствительности акселерометра) напряжения сигналов, формируемые для каждой из компонент, будут иметь следующий вид:

где - коэффициенты нестабильности; U0- напряжение питания.
- коэффициенты нестабильности; U0- напряжение питания.
Следовательно, функция формирования погрешности преобразования параметров ускорений в параметры угла наклона φописывается на основании выражения:  где
где - реальное значение угла наклона.
- реальное значение угла наклона.
Рисунок 7 подтверждает факт прямой зависимости максимального рассогласования ветвей измерительного преобразователя параметра наклона при максимальном значении мультипликативной погрешности.
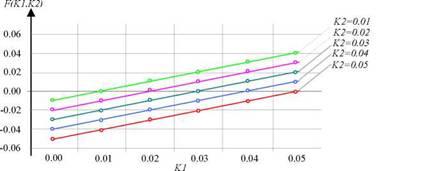
Рисунок 7 - Зависимость рассогласования ветвей измерительного преобразователя от мультипликативной погрешности
Следовательно, мультипликативная погрешность не может быть скомпенсирована в полной мере, для её частичного устранения, в основном, применяются компенсационные методы [58].
1.4
Еще по теме Анализ метрологических характеристик акселерометрических преобразователей:
- Анализ методов гониометрического контроля на базе акселерометрических преобразователей
- Разработка алгоритма настройки акселерометрических преобразователей
- 3.1.4 Разработка алгоритма виртуального позиционирования акселерометрических преобразователей
- Исследование процессов регистрации сигналов акселерометрических преобразователей
- 1.2. Анализ метрологического обеспечения систем контроля и диагностирования сложных технических объектов.
- Вторичные преобразователи, используемы для измерений сопротивления терморезистивных преобразователей.
- Сравнительная характеристика известных порядков синтаксического разбора простых предложений. Четыре составляющих синтаксического анализа простого предложения: структурная характеристика; семантические особенности; коммуникативные признаки; пунктуационный анализ
- 4.2 Разработка метрологического обеспечения системы диагностирования технического состояния электрооборудования ЛТС.
- в главе проводится анализ влияния взаимного расположения НКА и созвездия НС, участвующего в сеансе навигационных определений, на корреляционные характеристики навигационных векторов, поступающих из НП. Проводится анализ влияния на точность навигационной оценки использования ковариационных матриц в диагональном виде без учета корреляционных характеристик ошибок векторов навигационных измерений. Показано, что существует резерв в повышении точности навигационных оценок на коротких интервалах про
- Концептуальный анализ выделенных характеристик войн
- Трансформаторные преобразователи
- Пьезоэлектрические преобразователи
- Терморезистивные преобразователи температуры
- Тензо- и пьезорезистивные преобразователи
- 3.2. Разработка функциональных преобразователей климатических параметров в электрический сигнал
- Разработка и исследование метрологического обеспечения системы гониометрического контроля