Методы гониометрического контроля
На пути развития гониометрии как метода контроля параметров взаимного отклонения базисов твердых тел, совершенствовались и средства контроля. Так, с целью адаптации устройств контроля под решение конкретных задач стали развиваться методы, классификация которых определяется типом чувствительного элемента, лежащего в основе преобразователя параметра наклона (рисунок 4) [38].
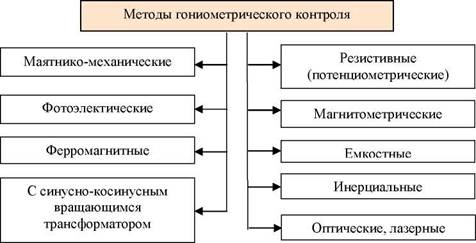
Рисунок 4 - Методы гониометрического контроля
Принцип работы потенциометрического метода измерений основан на регистрации изменения сопротивления переменного резистора пропорционального углу перемещения подвижных механических контактов в результате движения объекта контроля (рисунок 5) [39].
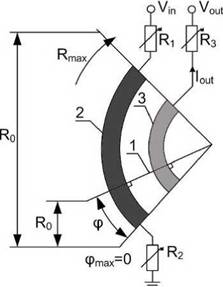
Рисунок 5 - Принцип действия потенциометрического датчика угла (диапазон 0- 360о): 1 - скользящий контакт; 2 - резистивная дорожка; 3 - контактная дорожка; φ - угол поворота; R0- максимальное значение сопротивления; R1, R2- подстроечные резисторы; R3- резистор нагрузки; Vin- напряжение питания; Vout - выходное напряжение, Iout- выходной ток
Магниторезистивные и индуктивные методы измерения угла также относятся к разновидности резистивных методов, однако имеют бесконтактный тип активации, построенный на базе воздействия переменного магнитного поля [38, 40].
На базе оптических и лазерных методов гониометрического контроля реализован большой класс геотехнического оборудования (теодолиты, нивелиры, системы обработки графической информации и 3D моделирования). Данный класс средств характеризуется высокой точностью контроля угловых премещений (до 0,001°). Однако низкая технологичность применнеия систем лазерного и оптического сканирования объектов контроля заключается в необходимости последовательного перемещения аппаратуры для построения полной картины
динамики угловых параметров, либо совместного применения нескольких систем сканирования, что ведет к увеличению стоимости организации гониометрического контроля.
Кроме того, данные методы требуют применнеия и разработки алгоритмов анализа графической информации и оперирования с большими потоками данных. Следует отметить, что сфера применения систем подобного класса ограничена объектами строительства и не позволяет применять данные системы при решении задач контроля биомеханических и иных объектов. Системы, реализующие оптический метод контроля также включают в себя системы видеорегистрации параметров движения на основе применения специализированных маркеров, перемещение которых фиксируется и отслеживается в потоке видеоинформации. Реализация данного метода хоть и позволяет контролировать биомеханические параметры, но осуществляется в стационарном режиме на основе специализированного помещения, оборудованного видеосистемами. Основным недостатком такого метода является стационарность, которая вызывает трудности его повсеместного практического применения.Инерциальные методы контроля углов построены по принципу регистрации параметров ускорения, которое претерпевает чувствительный элемент (масса) в процессе движения. С точки зрения технической реализации, инерциальные средства измерений включают в себя чувствительный элемент, состоящий из двух частей: одна из которых подвижна (масса) и закреплена в корпусе прибора посредством пружины и демпфера, вторая - неподвижна, и представляет собой емкостной, индуктивный или резистивный преобразователь, расположенный перпендикулярно оси сжатия/растяжения пружины (ось чувствительности), на которой закреплена масса. Посредством преобразователей перемещение массы внутри корпуса прибора при его движении преобразуется в электрический сигнал, пропорциональный ускорению [41]. Основными измерительными преобразователями, функционирующими на базе инерциального метода, являются акселерометры и гироскопы.
Гироскопический метод контроля углов является инерциальным и построен
на принципе регистрации силы Кориолиса, возникающей в результате действия входной угловой скорости [42]. Данный метод требует настройки не только скоростных параметров гироскопического датчика, но и пространственного положения.
Это обеспечивается за счет совместного использования акселерометрических измерений, оси которого стабильно ориентированы за счет сил гравитации.Кроме того, основным недостатком инерциальных гироскопических методов измерения является накопление ошибки за счет вычисления скорости на базе алгоритма интегрирования ускорения. Это приводит к преобразованию ошибки измерения ускорения в мультипликативную ошибку скорости. Этот процесс периодичен и имеет обратную вязь по ускорению свободного падения: период нарастания ошибки был определен в качестве постоянной величины (постоянная Шулера) и равен 84 минуты для тел, находящихся под действием гравитационной силы Земли [43]. Следует отметить, что для процессов, характеризующихся высокой динамикой изменения угловых параметров, данный диапазон нарастания ошибки является значительным. Кроме того, накопление множества малых погрешностей измерения ведет к росту амплитуды их колебаний. Дополнительно, при измерении ускорения свободного падения и кажущего ускорения, ошибки гироскопа вызывают ошибки направления, также нарастающие со временем и вызывающие ряд косвенных ошибок измерения.
В рамках данной диссертационной работы акселерометрические преобразователями являются базовыми для разработки фазометрического метода гониометрического контроля. Следовательно, необходимо провести наиболее подробный анализ метода гониометрического контроля на базе акселерометров, которому будет посвящен пункт 1.3 данной главы диссертационной работы.
1.2.2
Еще по теме Методы гониометрического контроля:
- Методы позиционирования и калибровки систем гониометрического контроля
- Анализ методов гониометрического контроля на базе акселерометрических преобразователей
- Оценка точности регистрации угловых параметров на базе разработанного метода гониометрического контроля
- Методы оценки и прогнозирования гониометрического состояния объекта контроля
- Алгоритмическая реализация моделей обработки данных в системе гониометрического контроля на базе фазометрического метода
- Анализ информационно-технического и методологического обеспечения гониометрического контроля
- Применение системы гониометрического контроля при геотехническом мониторинге и результаты исследования
- Визуализация данных гониометрического контроля
- Анализ особенностей процесса организации гониометрического контроля и сфер его применения
- Исследование и разработка модели обработки информации при гониометрическом контроле
- Построение угловой модели и исследование достоверности гониометрического контроля
- Техническая реализация системы гониометрического контроля
- Применение системы гониометрического контроля при биомеханических исследованиях
- Разработка и исследование метрологического обеспечения системы гониометрического контроля
- Алгоритм сбора и передачи данных системы гониометрического контроля
- 6.7. Методы контроля
- Виды, формы и методы финансового контроля, их характеристика
- Формы и методы контроля
- Методи наступного контролю
- 5.5.Типология форм и методов эффективного контроля.