6.3.2.3. Подготовка к работе и работа с радионавигационной аппаратурой «Грот»
Радионавигационная аппаратура «Грот» обеспечивает решение следующих задач:
автоматическое определение текущих координат местоположения, высоты, скорости, азимута движения и текущего времени по радиосигналам космической навигационной системы ГЛОНАСС, NAVSTAR (GPS) или совместной группировке этих космических навигационных систем;
автоматический прием, хранение, обновление альманахов;
автоматический самоконтроль технического состояния и функционирования;
выбор оператором рабочей КНС, системы координат и вида их отображения;
решение сервисных задач;
непрерывный круглосуточный режим работы от бортовой сети или сети общего назначения 220 В, 50 Гц.
Радионавигационная аппаратура «Грот» в техническом исполнении представляет собой приемоиндикатор КНС ГЛОНАСС / GPS «ГРОТ-Н» в составе:
блок электронный приемоиндикаторный;
модуль антенный.
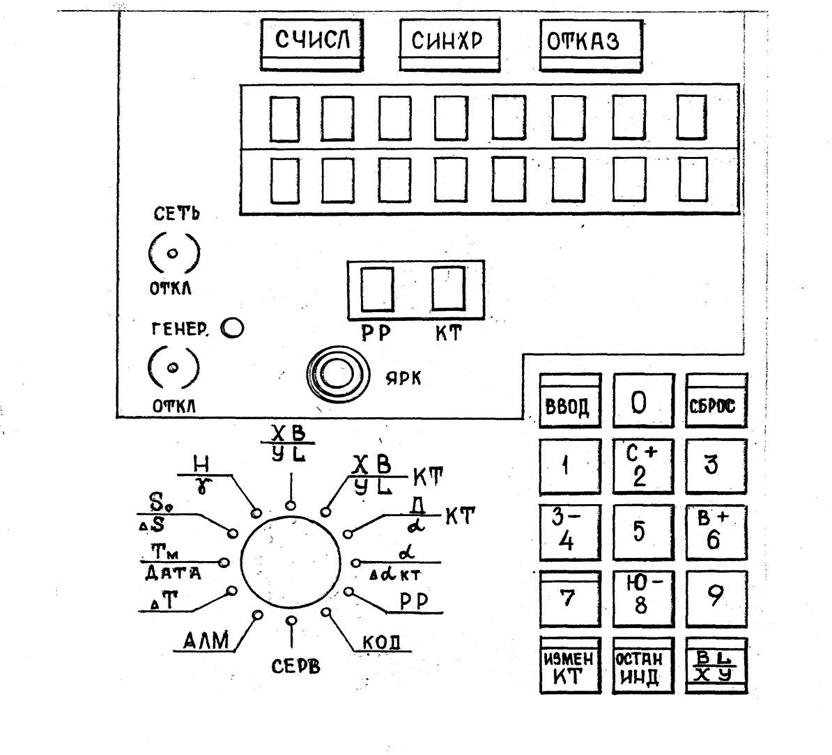
Внешний вид панели электронного приемоиндикаторного блока показан на рисунке 6.24. Управление аппаратурой осуществляется с помощью клавиатуры. Функциональное назначение клавиш на блоке электронном приемоиндикаторном представлено в таблице 6.10.
Таблица 6.10 – Функциональное назначение клавиш на блоке электронном приемоиндикаторном
| Обозначение клавиш | Функциональное назначение |
| 0, 1, …, 9, . | Ввод данных в формате с плавающей точкой |
| F | Переключатель клавиш из режима ввода цифр в режим выполнения функций |
| СТИР | Стирание символа на который указывает курсив |
| ОТМ | Отмена последней операции |
|
| Перемещение курсора
|
|
| Ввод набранной информации (клавиша ввода) |
| МЕНЮ | Переключение экрана информации на решение навигационной задачи на экран МЕНЮ |



 ,
, 
Экран дисплея приемоиндикатора условно разбит на знакоместа – на 4 строки по 16 символов (знакомест) в каждой.
В каждое знакоместо может быть выведен один из заранее заданных символов. В число этих символов входят все буквы латинского алфавита, цифры, а также 8 отдельно программируемых знаков. Таким образом, может быть произведено 8 русских букв, не совпадающих по начертанию с латинскими.
Нумерация строк производится сверху.
Дисплей может отображать два вида экранов: работа с меню и результаты измерений.
С клавиатуры можно производить следующие действия:
выбор режима работы;
выбор параметров рабочего режима навигации;
выбор скорости приема дифференциальных поправок и выдачи информации на внешнее устройств.
Приемоиндикатор выдает на дисплей:
время и дату;
результаты автоматического самоконтроля;
текущие координаты в выбранной системе координат;
азимут направления движения;
вектор путевой скорости и ее составляющие;
результаты оценки точности определения координат;
информацию о рабочем созвездии КНС;
признаки текущего режима работы.
Основные режимы работы аппаратуры:
режим инициализации;
режим ввода начальных данных;
режим навигации;
режим решения сервисных задач.
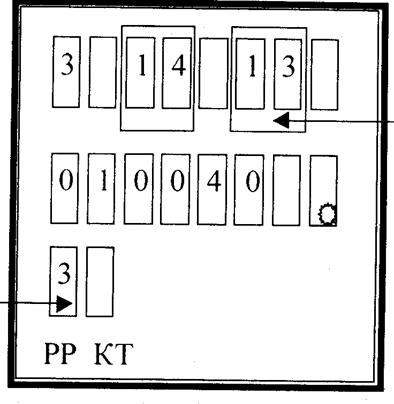
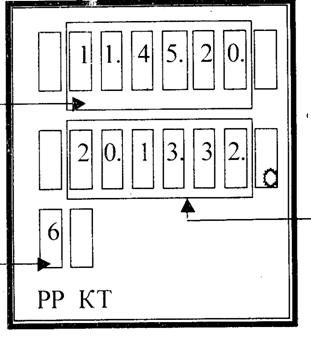
В режим инициализации приемоиндикатор переходит сразу после включения. Включение производится тумблером ОТКЛ/ВКЛ. После чего автоматически выполняются тесты самоконтроля. Если ошибок не обнаружено, на индикаторе появляется следующая информация:
в первой строке – время;
во второй строке – дата;
в третьей строке – уровень заряда АКБ;
в четвертой строке – версия системы программного математического обеспечения.
Пример индикации на экране дисплея в режиме инициализации показан на рисунке 6.25.
После окончания тестирования (длительность тестирования 2 с) автоматически устанавливается режим навигации со следующими параметрами:
рабочая система координат SK-42;
вид проекции – геодезическая (BL);
рабочая система спутников – ГЛОНАСС/GPS.
Минимальная величина угла возвышения спутника над горизонтом, с которого будет начинаться поиск, – 80.
После завершения режима инициации может быть установлен режим навигации с параметрами по выбору оператора (НАВ ОПР).
Для этого требуется ввести (выбрать) начальные данные из имеющегося перечня в следующей последовательности:
систему координат – СК-42, СК-95, WGS-84, ПЗ-90;
вид проекции отображения (для СК-42, СК-95) – геодезические (B, L, H) или прямоугольные (GAUSS) координаты;
рабочая система спутников – ГЛОНАСС, GPS, или совмещенная группировке ГЛОНАСС/GPS;
код сигнала для ГЛОНАСС – ВТ (высокая точность) или ПТ (пониженная точность);
скорость передачи навигационной информации (при работе в дифференциальном режиме).
Порядок ввода начальных данных:
нажать клавишу МЕНЮ, при этом на экране дисплея высветится главное меню
| Г | Л | А | В | Н | О | Е | |||||||||
| Н | А | В | О | П | Р | С | Т | А | Т | И | С | ||||
| D | И | F | П | О | П | Р | С | П | У | Т | Н | ||||
| С | Е | Р | В | И | С | Д | А | Л | Е | Е |
выбрать с помощью клавиш управления курсором пункт НАВ ОПР и нажать клавишу ввода. После этого главное меню сменится меню СИСТ КООРДИНАТ
| С | И | С | Т | К | О | О | Р | Д | И | Н | А | Т | |||
| С | К | - | 4 | 2 | W | G | S | - | 8 | 4 | |||||
| С | К | - | 9 | 5 | |||||||||||
| П | З | - | 9 | 0 |
произвести выбор системы координат и нажать клавишу ввода.
Выбор СК-42 приведет к меню ВИД| В | И | Д | |||||||||||||
| B | L | Н | |||||||||||||
| G | A | U | S | S | |||||||||||
произвести выбор вида отображения координат – ВLН (широта, долгота, высота) или GAUSS (Х, У, Н) и нажать клавишу ввода. На экране появится меню СИСТЕМА
| С | И | С | Т | Е | М | А | ||||||||
| Г | Л | О | Н | А | С | С | ||||||||
| N | A | V | S | T | A | R | ||||||||
| ∑ |
произвести выбор космической навигационной системы и нажать клавишу ввода. На экране появится меню РЕЖИМ. Для работы с совмещенной группировкой выбирается ∑
| Р | Е | Ж | И | М | ||||||||||
| П | Г | |||||||||||||
| В | Т |
произвести выбор режима ВТ (высокая точность) или ПТ (пониженная точность).
Нажать клавишу ввода. При выборе режима ВТ появится экран с сообщением ВВЕДИ НАЧ СОСТ и символьная строка, при этом курсор стоит в первой позиции цифровой строки| В | В | Е | Д | И | Н | А | Ч | С | О | С | Т | |||
 * * | * | * | * | * | * | * | * | * | * |
набрать с помощью клавиатуры требуемое число, которое доводится вышестоящим штабом, нажать клавишу «F», а затем клавишу ввода. После этого на экране появится главное меню и приемоиндикатор переходит в режим непрерывных навигационных определений.
При выборе сигнала ПТ (пониженной точности) на экране сразу появится главное меню и приемоиндикатор переходит в режим непрерывных навигационных определений (в режим навигации).
В режиме навигации происходят ежесекундные измерений координат местоположения, путевой скорости, курса.
После завершения режима инициализации и ввода начальных данных необходимо нажать клавишу МЕНЮ. Через время не превышающее 3 минуты на экране должны появиться результаты измерения координат.
Переход от экрана координат к экрану с результатами измерения скорости и курса осуществляется нажатием клавиши ∆ .
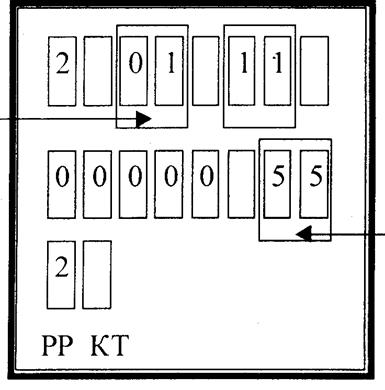
Пример вида экрана при считывании результатов измерений приведен на рисунке 6.26.
Информация о состоянии аккумуляторной батареи занимает 1 разряд и передается обозначениями:
« » – заряд батареи 100%;
« = » – средняя степень разряда батареи (до 50%);
« – » – сильная степень разряда батареи (до 10%);
« А » – батарея разряжена, требуется заряд.
Признак качества решения навигационной характеризует погрешность определения координат (3σ), занимает один разряд и может принимать значения от 0 до 4:
0 – 3σ ≤3 м;
1 – 3 м < 3σ ≤ 30 м;
2 – 30 м < 3σ ≤ 100 м;
3 – 100 м < 3σ ≤ 300 м;
4 – 300 м < 3σ ≤1000 м.
Наличие знака «+» после признака качества говорит о том, что решение навигационной задачи объемное, знак «–» – плоскостное.
Признак системы координат занимает два разряда и имеет обозначения:
ПЗ – решение в системе ПЗ-90;
WG – решение в системе WGS-84;
СК – решение в системе СК-42 в геодезической проекции;
ГК – решение в системе СК-42 в проекции Гаусса-Крюгера;
95 – решение в системе СК-95 в геодезической проекции и проекции Гаусса-Крюгера.
Признак используемой космической навигационной системы занимает один разряд и имеет обозначения:
П – используется система ГЛОНАСС, радиосигналы ПТ;
В – используется система ГЛОНАСС, радиосигналы ВТ;
N – используется система NAVSTAR (GPS);
∑ – используется совмещенная группировка систем ГЛОНАСС и GPS.
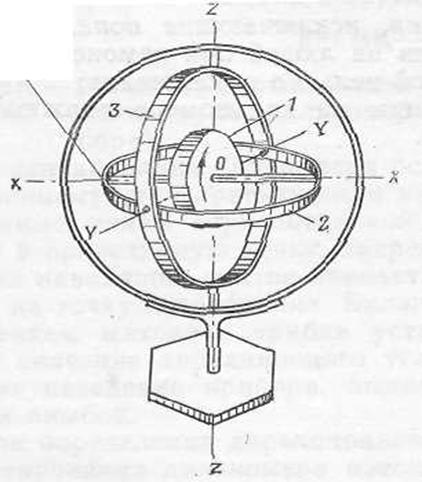
 |
Рисунок 6.1 – Свободный гироскоп в кардановом подвесе
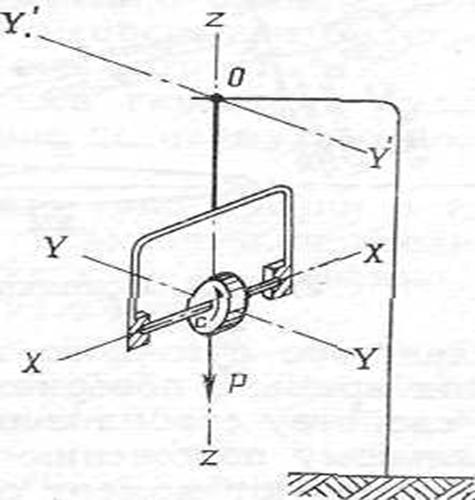
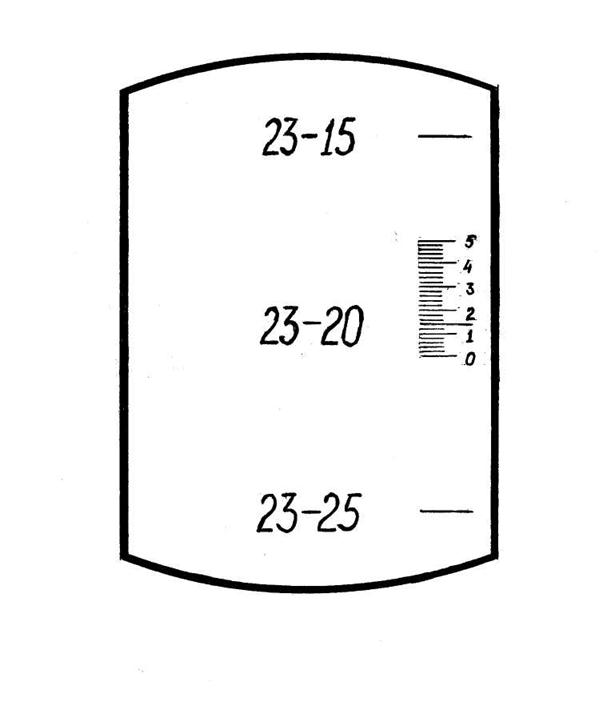 |
Рисунок 6.2 – Принципиальная схема маятникового гироскопа
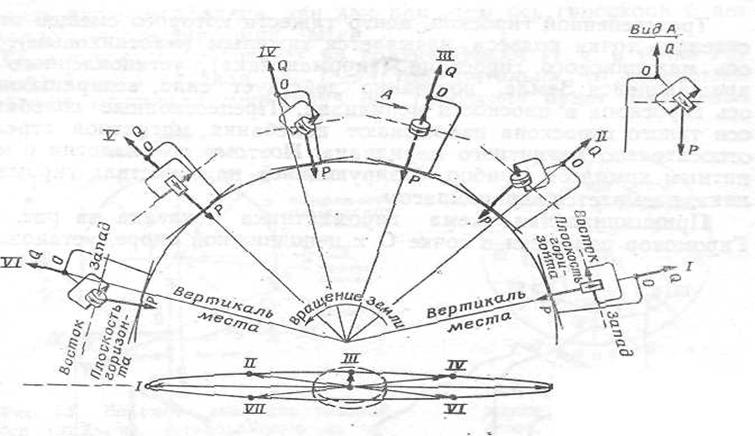
Рисунок 6.3 – Принцип действия маятникового гироскопа
а б
 |
Рисунок 6.4 – Примеры снятия отсчетов по точкам реверсии в гирокомпасе 1Г17 (а – 157°46′25′′, б – 157°55′19′′)
 |
Рисунок 6.5 – Пример снятия отсчетов по точке реверсии в гирокомпасе
1Г25-1 (отсчет 23-21,5)
Рисунок 6.6 – Кинематическая схема гироазимута
(1 - щетка; 2,3 - контактная группа; 5 - внешняя рама дополнительного карданового подвеса; 6 - рама гироузла курсового гироскопа; 7 -ось; 8 - горизонтирующий коррекционный мотор; 9 - внутренняя рама дополнительного карданового подвеса; 18 - пружина; 11,12 ‑ планка; 12 - колодка; 14 -колодка арретира; 15 -якорь; 16 ‑ электромагнит; 22 - рама демпфера; 23 - корпус гироскопа демпфера; 24 - азимутальный коррекционный мотор; 25 - курсовой гироскоп, 26 - датчик курса)
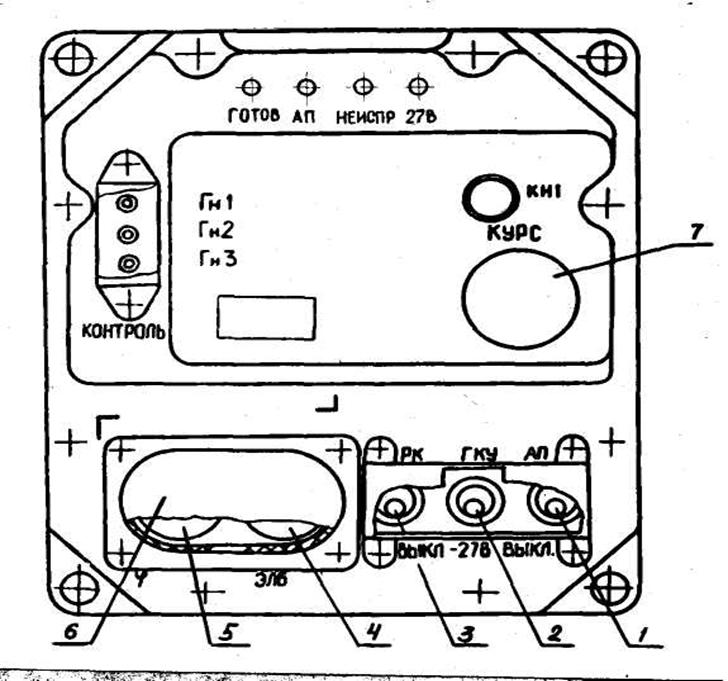
Рисунок 6.7 – Принцип работы автономной навигационной аппаратуры
 |
а
align=left>

 ; 6 - крышка; 7 - технологическая шкала КУРС)
; 6 - крышка; 7 - технологическая шкала КУРС) 
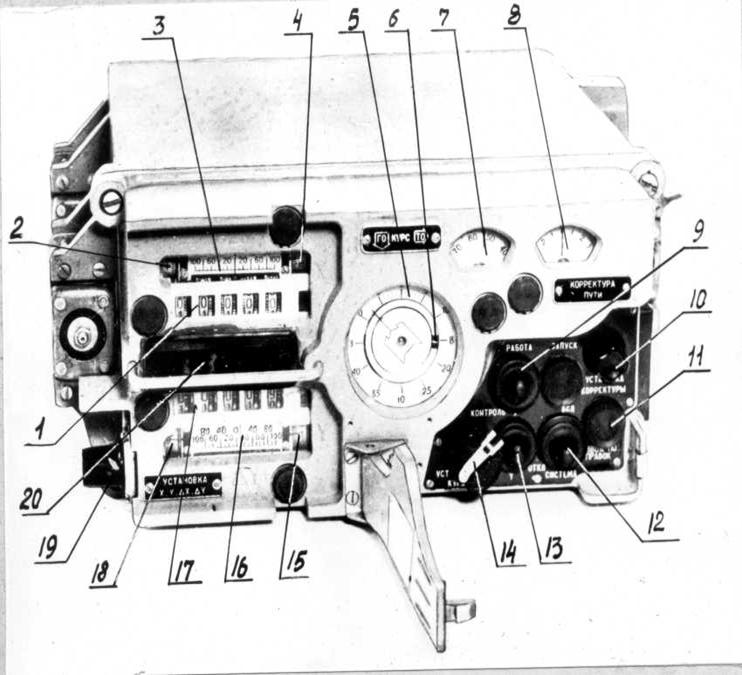
 ∆У; 17 ‑ шкала У; 18 - барабан - ∆У; 19 - ручка УСТАНОВКА Х, У,∆ Х,∆У; 20 ‑ рычаги установки Х, У,∆ Х,∆У)
∆У; 17 ‑ шкала У; 18 - барабан - ∆У; 19 - ручка УСТАНОВКА Х, У,∆ Х,∆У; 20 ‑ рычаги установки Х, У,∆ Х,∆У)
 Рисунок 6.13 – Сущность перехода к условной системе координат при совместной выверке гирокурсоуказателя и цепи снятия пути
Рисунок 6.13 – Сущность перехода к условной системе координат при совместной выверке гирокурсоуказателя и цепи снятия пути