Изменение антропогенной нагрузки в окрестностях г. Санкт-Петербурга по данным дистанционного зондирования в видимой области спектра
Обработка данных дистанционного зондирования заключалась в совместном анализе данных трех спектральных каналов приборов MSU-E (спутник Космос-1939) и HRV (спутник SPOT) с целью классификации природных объектов и изучения их свойств.
В окрестностях Санкт-Петербурга был выбран полигон, обозначенный на рис. 8.3 цифрой 1.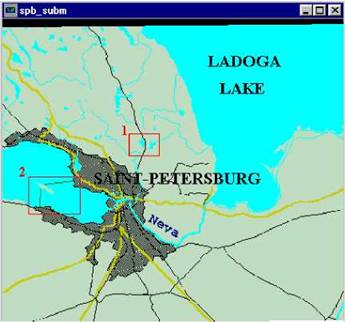
Рис. 8.3. Расположение полигона на карте окрестностей г. Санкт-Петербурга
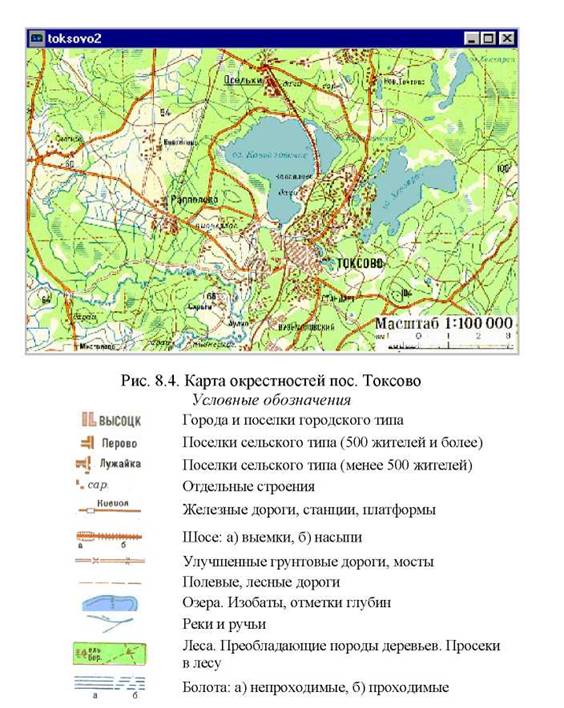
На территории полигона, расположенного в районе поселка Токсово, находится два крупных озера -- Кавголовское и Хеппо-Ярви, а также около десятка более мелких. В юго-западной части полигона протекает р. Охта, правый приток р. Невы, кроме того, на исследуемом пространстве много мелких речек и ирригационных канав. Растительность определяется лесами различных типов -- хвойными и смешанными, частично заболоченными. На территории полигона достаточно много полей, расположенных вблизи многочисленных поселков, и больших открытых участков леса, лугов и болот. Карта окрестностей поселка Токсово представлена на рис. 8.4.
На первом этапе файлы исходных данных прибора HRV спутника SPOT и сканерное изображение карты были приведены к единой географической проекции (Reformat>RESAMPLE). После этого из трансформированных изображений были вырезаны фрагменты (Reformat>WINDOW), определяемые границами выбранного полигона.
Соответствующий фрагмент карты, приведенный к проекции Меркатора, показан на рис. 8.5:

Рис. 8.5. Карта полигона
Для отображения файлов .IMG, представляющих фрагменты изображений, полученных для каждого из спектрального канала прибора HRV, были подготовлены файлы палитры (spot1t.SMP,
spot2t.SMP, spot3t.SMP) (рис 8.6-8.9).
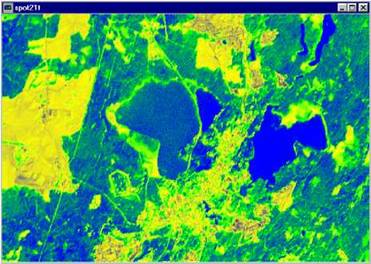
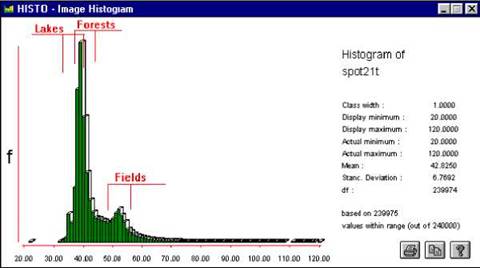
Рис. 8.7. Гистограмма изображения, полученного на 1-м канале прибора HRV
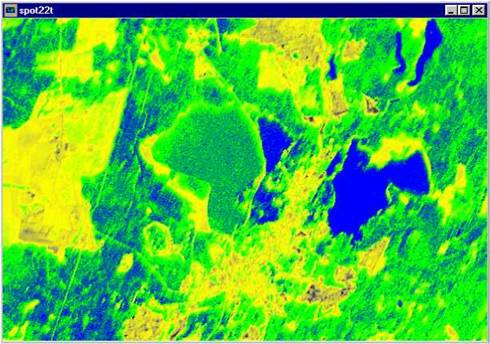
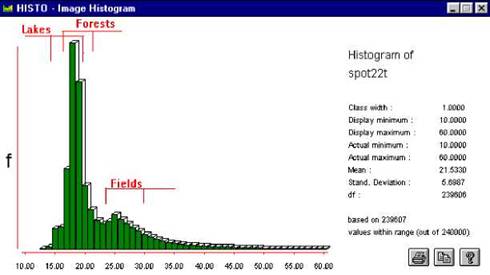
Рис. 8.9. Гистограмма изображения, полученного на 2-м канале прибора HRV
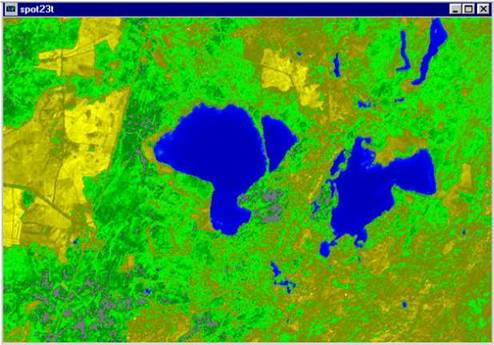
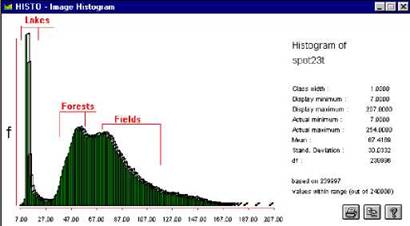
Рис. 8.11. Гистограмма изображения 3-го канала прибора HRV
Таким образом, основываясь на информации первого и второго каналов, не удается провести однозначную классификацию природных объектов. Информация, полученная в третьем спектральном диапазоне прибора HRV, позволяет уверенно классифицировать озера с помощью модуля RECLASS. При классификации растительности получаются несколько худшие результаты (рис. 8.10 и 8.11).
Полученные результаты классификации природных объектов по информации, полученной в 3-м спектральном канале, не следует распространять на другие наборы данных. К такому результату приводит «сочетание» различных обстоятельств -- времени зондирования, состояния растительности. Поэтому 3-й спектральный канал оказывается более информативным, чем первые два. Чтобы убедиться в этом, достаточно сравнить гистограммы изображений, полученных на 3-м спектральном канале (рис. 8.11) и методом главных компонент (рис. 8.12).
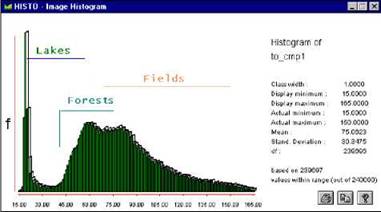
Рис. 8.12. Гистограмма изображения, полученного методом главных компонент
Метод главных компонент (Principal Components Analysis) — это способ свертывания информации, когда одно изображение заменяет 3 или 4 без существенной потери информации.
В табл. 8.1 приведены коэффициенты корреляции между исходными файлами отдельных спектральных каналов (spot21t.img - 1-го, spot22t.img - 2-го и spot23t.img - 3-го) и файлами главных компонент (C1 - 1-й, C2 - 2-й и C3 - 3-й).Таблица 8.1
Коэффициенты корреляции между исходными файлами и файлами главных компонент
| ФАЙЛЫ | C1 | C2 | C3 |
| spot21t | 0.678413 | 0.725250 | -0.118604 |
| spot22t | 0.549894 | 0.824819 | 0.132400 |
| spot23t | 0.998980 | -0.044851 | 0.001179 |
Из таблицы видно, что первую главную компоненту определяет в основном информация 3-го канала (r = 0.998980). Высокая информативность 3-го канала определяет результаты классификации с обучением (рис. 8.13) и без обучения (рис. 8.14) -- своими очертанииями эти рисунки напоминают рис. 8.10, представляющий изображение, полученное на 3-м канале прибора HRV.
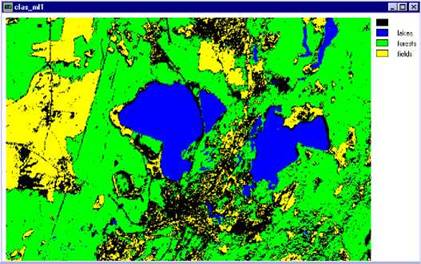
Рис. 8.13. Результат классификации с обучением (модуль MAXLIKE, Proportion to exclude -- 1%)
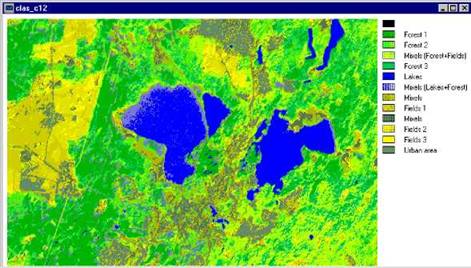
Рис. 8.14. Результат классификации без обучения ( модуль CLUSTER)
Один из вопросов, который изучался для полигона, расположенного в районе пос. Токсово, заключался в оценке изменения антропогенной нагрузки на этот район в 90-х гг. на основании сопоставления: карты, состояние местности на которой соответствует началу 80-х гг.; изображения, полученного с помощью прибора МСУ-Э 13 мая 1989 г.; изображения, полученного с помощью прибора HRV 26 августа 1996 г.
Карта и спутниковые изображения трансформированы с помощью модуля RESAMPLE в проекцию Меркатора с одними и теми же параметрами, при этом соответствующие пиксели любого из обрабатываемых изображений имели одни и те же географические координаты, что позволяло переносить результаты векторизации с одного изображения на другое. На рис. 8.15. представлен результат классификации данных прибора HRV без обучения модулем ISOCLUST при 22 кластерах. Рисунок 8.16 повторяет предыдущий, но здесь на растровую подложку выведено четыре векторных файла:ochta.vec -- р. Охта, оцифрованная с карты и представленная в левом нижнем углу рис. 8.16 синей ломаной линией;
rroad.vec -- железная дорога, оцифрованная с карты и показанная на рис. 8.16 красно-белой ломаной линией, идущей приблизительно посередине рисунка с юга на север;
ua_old.vec -- границы старой застройки, оцифрованные с карты и представленные на рис. 8.16 тонкими красными ломаными линиями;
ua_new.vec -- границы новой застройки, оцифрованные непосредственно с результата классификации данных прибора HRV на рис. 8.15 и представленные на рис. 8.16 жирными красными ломаными линиями.
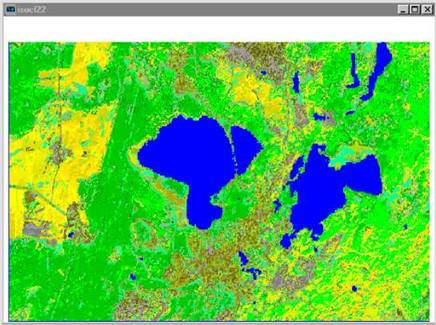
Рис. 8.15. Результат классификации данных прибора HRV без обучения модулем ISOCLUST при 22 кластерах
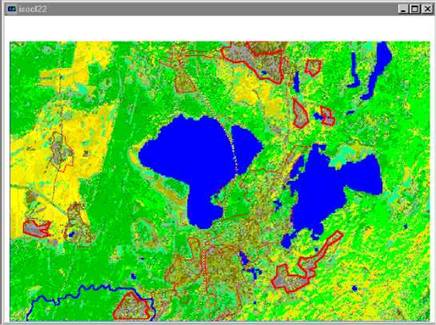
Границы новой застройки по данным прибора HRV оцифровывались приблизительно по тем же кластерам, которые при сопоставлении результатов классификации с картой, должны быть отнесены к районам жилой застройки.
Эти же границы показаны на рис. 8.17, представляющем результаты классификации данных прибора МСУ-Э без обучения модулем ISOCLUST при 21 кластере.
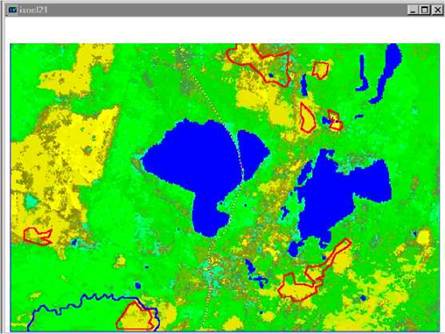
Рис. 8.17. Результат классификации данных прибора МСУ-Э без обучения модулем ISOCLUST при 21 кластере и выведения на растровую подложку векторных файлов
Как видно из рис. 8.17, в данном случае кластеры, попадающие в границы новой застройки, показанные жирными красными ломанными линиями, в основном не совпадают с кластерами, которые можно отождествить со старой застройкой. Из этого можно сделать вывод о том, что новая застройка появилась между 1989 и 1996 гг. -- датами соответствующих спутниковых снимков.
8.1.2.
Еще по теме Изменение антропогенной нагрузки в окрестностях г. Санкт-Петербурга по данным дистанционного зондирования в видимой области спектра:
- § 5.4. Скотоводство в Кисловодской котловине в I тыс. н.э. по данным полевого обследования и результатам дистанционного зондирования.
- Измерение температуры водных поверхностей в регионе г. Санкт-Петербурга по данным прибора AVHRR спутника NOAA
- § 2.2. Работа с данными дистанционного зондирования.
- Обзор систем дистанционного зондирования
- Мониторинг лесных массивов по данным дистанциионного зондирования
- Общая характеристика методов дистанционного зондирования
- ЧАСТЬ II. Санкт-Петербург с середины XIX по XXI вв.: история, поэтика, метафизика Тема 8. Петербург второй половины XIX века: Петер
- 57. Правительство Санкт – Петербурга. Порядок формирования и компетенция
- Конвергенция информационных технологий и методов дистанционного зондирования для построения аэрокосмического экологического мониторинга мегаполисов
- 55. Институт Уполномоченного по правам человека в Санкт-Петербурге
- 53. Санкт-Петербург как город федерального значения. Устав СПб
- 1.3 Нормативные правовые акты органов государственной власти Санкт - Петербурга
- 54. Законодательное Собрание Санкт-Петербурга: порядок формирования, состав, структура
- Санкт-Петербург
- 120. Правовые основы прохождения государственной службы в Санкт – Петербурге.
- Программа курса ЧАСТЬ I. Санкт-Петербург с основания до середины XIX века Тема 1. Культура города и пути ее изучения
- О двух греческих юридических рукописях в Санкт-Петербурге
- М.В.Г АВРИЛОВА Санкт-Петербург ХУДОЖЕСТВЕННОЕ ПРОСТРАНСТВО ПЕРСОНАЖА
- М. В. РУМЯНЦЕВА Санкт-Петербург ЭМПАТИЯ В ПСИХОЛОГИИ И ЛИНГВИСТИКЕ