Приложение 5 Автоматизация периодического тепловизионного контроля, мониторинга и диагностики состояния оборудования
В последнее время все большее распространение в самых различных отраслях промышленности получили методы и средства инфракрасной термографии механического, теплоэнергетического и электрического оборудования, осуществляемые с использованием переносных, малогабаритных тепловизоров (матричных инфракрасных камер) и термографов (линейных инфракрасных сканеров).
Особое преимущество ИК термографии заключается в существенном сокращении времени и повышении достоверности контроля, так как этот метод позволяет без соприкосновения с объектом, за одно измерение получать интегральное распределение температуры в определенной области, соответствующей видеокадру, при обеспечении высокой точности измерений температуры контролируемых объектов, достигающей десятые и сотые доли градуса. Это позволяет поводить диагностику на ранней стадии развития дефектов, причем, в процессе эксплуатации электрического и механического оборудования.
К числу таких ИК-камер относятся, например: «ИРТИС-2000» (фирмы «ИРТИС», г. Москва), «VarioCAM™» (фирмы «Jenoptik», ФРГ), «ThermaCAM Р65», «ThermaCAM Е45» (фирмы «FLIR SYSTEM», США), «ТН 7102», «ТН 9100» (фирмы «NEC», Япония) и др.
Программное обеспечение ИК-камер позволяет осуществлять управление и оперативную настройку ИК-камеры, фиксировать максимальную, минимальную и среднюю температуры в поле кадра и в выделенных областях, корректировать коэффициенты излучения, записывать отдельные термограммы в файлы стандартный графических форматов, измерять температуры в заданных точках, выбирать различные палитры, строить изотермы, гистограммы, графики температурных изменений во времени, распечатывать термограммы, протоколы и отчеты.
Сотрудниками секции «Неразрушающий контроль и диагностика» Иркутского государственного университета путей сообщения проведен большой комплекс работ по изучению возможности и эффективности использования тепловизионного метода в задачах контроля и диагностики дефектов электрического и машинного оборудования электровозов и ' тепловозов [78, 118, 125].
Дальнейшие работы в ИрГУПС в области внедрения тепловизионной диагностики развиваются по двум направлениям:1) расширение возможных областей эффективного использования тепловизоров при технических осмотрах и ремонте локомотивов, а также электрического, теплотехнического и машинного оборудования предприятий;
2) разработка алгоритмического и программного обеспечения автоматизации обработки больших массивов термоинформации с целью термомониторинга и диагностики дефектов больших массивов многономенклатурных деталей и изделий.
1. Проблемы существующих методов обработки термоизображений
Проведенные авторами исследования показали, что тепловизор может эффективно применяться в железнодорожной отрасли на пунктах технического обслуживания локомотивов (ПТОЛ) и при контроле качества их ремонта в депо. Установлено, что на электровозах можно выявлять такие повреждения, как: межвитковые замыкания, нарушение и пробой изоляции, ослабления соединений, задевания подвижных элементов о кожухи, дефекты радиаторов и щеточно-коллекторыных узлов, чрезмерный нагрев и дефекты подшипников тяговых электродвигателей, тяговых трансформаторов, сглаживающих реакторов, выпрямительных установок, цепей управления, крышевого и низковольтного оборудования, аккумуляторных батарей, букс и т.д. [118,125].
Однако термодиагностика дефектов локомотивов имеет свои особенности. На электровозах, во время их работы невозможно производить термоконтроль большинства оборудования, находящегося в высоковольтной камере. В период, предшествующий техосмотру на ПТОЛ электровоз может работать с разной нагрузкой и в различных режимах. На электровозах имеется большое количество панелей, электрических сборок, схем со многими десятками наименований электроконтактного, коммутационного оборудования, реле, преобразователей и др. Как правило, при тепловизионной съемке в поле кадра ИК-камеры попадают десятки однотипных, а чаще разнотипных деталей, имеющих индивидуальные коэффициенты излучения и допустимые границы температур.
Аналогичная ситуация возникает и при тепловизионном контроле силовых и распределительных щитов электроподстанций, котельных, ТЭЦ.Это приводит к тому, что даже с использованием современного программного обеспечения обработки термограмм фирм-изготовителей тепловизоров, время обработки большого количества термограмм со значительным количеством разнородных деталей на них очень велико, что неприемлемо при ограниченном сроке технического обслуживания или послеремонтного испытания локомотивов. К тому же существующие формы термографических протоколов и отчетов содержат большое количество визуальной информации (термограмм), в то время как для технических служб нужна количественная текстовая информация с заключением по состоянию деталей. Даже в случае испытаний электровозов после ремонта или перед техосмотром невозможно обеспечить их работу с максимальной нагрузкой, поэтому при термодиагностике приходится в основном ориентироваться на статистические данные - изменение температуры по отношению к однотипным деталям или по отношению к данным предшествующих измерений.
Проведенные авторами исследования показали, что обеспечение высокой производительности обработки больших массивов информации при периодических термоконтрольных работах, решение задач раннего обнаружения дефектов при различных режимах работы локомотивов невозможны без разработки и внедрения программного комплекса и технологии автоматизированного термомониторинга и диагностики дефектов электрического и машинного оборудования локомотивов.
Тепловизионный мониторинг и диагностика в дополнение к имеющейся на
железной дороге системе вибрационного мониторинга и диагностики «Прогноз- 1» и «Вектор» позволит реализовать обслуживание и ремонт локомотивов с учетом фактического состояния.
2. Технология автоматизированного термомониторинга и диагностики
По сути, речь идет о переходе от качественного визуального анализа термограмм к количественному автоматизированному анализу температур (и построению трендов температур) интересующего ремонтников и диагноста перечня деталей при периодических обследованиях локомотивов.
В этом случае наиболее х- -рациональной будет технология термомониторинга и диагностики, состоящая из следующей последовательности контрольно- диагностических операций;1) Создается или приобретается фото-термографическая система (включающая объединенные в единый блок цифровую фото- и термокамеру с синхронизацией наведения на резкость и срабатывания затворов. Такими возможностями обладают тепловизоры «VarioCAMTM» (фирмы «Jenoptik»), «ТН 9100» (фирмы «NEC»). Условимся далее называть изображение полученное фотокамерой - видеоизображением (или просто изображением), полученное термокамерой (термографом) - термоизображением (термограммой).
2) Проводится калибровка фото-термооптической системы, с целью выявления однозначного соответствия между видео- и термоизображением (проводится один раз в случае жесткой связи фото- и термокамер).
3) Создается маршрут обхода подконтрольного оборудования, т.е. на схеме локомотива (или цеха) намечаются точки и направление проведения тепловизионной съемки, охватывающие всю номенклатуру обследуемого оборудования, которые помечаются метками на схеме и непосредственно на месте съемки. На схеме указывается последовательность обхода точек по маршруту. Направления измерений привязываются к системе естественных или искусственных ориентиров.
4) Проводится контрольный обход по маршруту, причем в каждой точке, по каждому направлению проводится фотосъемка, т.е. создается массив базовых изображений панелей, сборок. Маршруты обхода являются типовыми для каждого типа электровоза, однако базовые изображения делаются для каждого электровоза в отдельности и сохраняются с указанием его идентификационного номера. При модификации какого-либо узла электровоза с изменением положения деталей, каждый последующий видеокадр становиться базовым.
5) На компьютере, в программной среде автоматизации термомониторинга и диагностики, на каждом базовом изображении с использованием курсора выделяется (очерчивается) контур интересующих термодиагноста деталей.
Каждой детали массива назначаются соответствующие координаты точек контура. Наименование детали, сведения о принадлежности ее к определенному классу (для назначения температурных допусков), о материале детали (для назначения индивидуального коэффициента излучения), заносятся в базу данных деталей (см. схему на рис. 1).6) Создаются также: база данных коэффициентов излучения (в зависимости от материалов и вида обработки поверхности) и база данных допустимых
температур (в зависимости от типа деталей). Заполняются табличные формы баз данных.
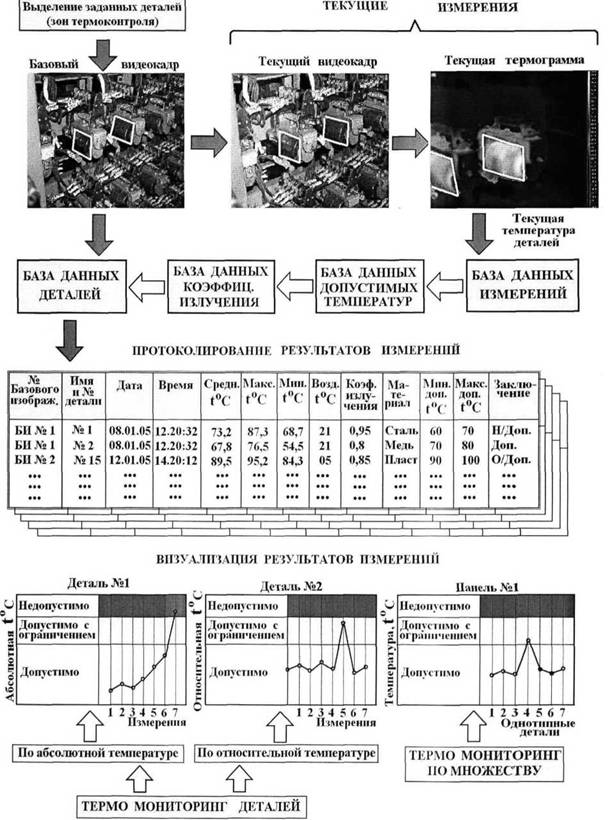
Рис.1. Схема сопоставления термограммы с текущим и базовым
видеокадрами с целью проведения мониторинга и диагностики выделенных деталей (катушек ВБ электровоза ВЛ-80)
7) При последующих периодических термообследованиях, оператор обходит точки по маршруту, соблюдая последовательность обхода точек и синхронное получение текущих видео- и термоизображений в каждом направлении измерений. Из-за неизбежных линейных и угловых рассогласований текущих точек и направлений съемки, текущие видеокадры будут несколько отличаться от базовых. Для коррекции рассогласований выполняется операция совмещения базового и текущего изображений. В дальнейшем, многократный проход по маршруту приводит к быстрому запоминанию оператором точек и направлений съемки, повышению автоматизма и производительности работы.
8) После каждого обхода по маршруту результаты измерений (текущие видео- и термокадры с указанием даты и времени обхода) передаются в базу данных измерений программы термомониторинга. После программной обработки результатов измерений, по данным, полученным из БД измерений, деталей, допустимых температур и коэффициентов излучения создаются протоколы в текстовом или графическом форматах с иллюстрацией изменения абсолютной, относительной температуры деталей во времени или изменения температуры однотипных деталей в поле допустимых температур (рис.
1).9) По каждому текущему видеокадру проводится выделение характерных точек, их сопоставление с характерными точками базового изображения и находится преобразование координат базового изображения в текущее с целью определения контуров заданных деталей на каждом текущем изображении.
10) Найденное преобразование координат используется для отображения контуров деталей из базового изображения в текущее. Для полученных контуров реализуется набор стандартных операций термоанализа (определение максимальной, минимальной, средней температур, среднеквадратичного отклонения и др.).
В программе последовательно проводится обработка видеотермоизображений по следующему алгоритму (рис.1):
Необходимо отметить, что выбранный алгоритм преобразования термоизображений в цифровой массив температурных характеристик определенных деталей позволяет реализовать в автоматическом режиме широкий, не имеющий аналогов набор дополнительных возможностей термодиагностики, а именно:
• построение трендов (временных зависимостей) изменения температур для каждой детали и сопоставление с индивидуальными допустимыми значениями (мониторинг по абсолютной температуре), со значениями температуры во время предыдущих измерений (мониторинг по относительной температуре), со значениями температуры по множеству однотипных деталей (мониторинг по множеству), со значениями температуры по отношению к температуре окружающей среды (рис.1);
• корректировка индивидуальных коэффициентов излучения и индивидуальных температурных допусков для каждой детали (гибкий мониторинг);
• регистрация результатов измерений в виде протоколов с именами деталей
и автоматически обновляемыми текущими значениями предельных и средних температур деталей, пределами сигнализации, коэффициентами излучения и заключением о годности деталей к дальнейшей эксплуатации;
• прогнозирование по трендам тенденций изменения температуры важнейших деталей, а значит и прогнозирование изменения их технического состояния;
• автоматическая обработка термоизображений в реальном времени при термоиспытаниях или реализация термоизмерений методом тепловой волны для поиска неоднородности структуры (трещин, раковин);
• автоматический учет и корректировки локальной температуры окружающей среды за счет включения в число обследуемых деталей имеющих эту температуру;
• автоматический учет режимов и нагрузки работы электровоза в период
перед измерением путем включения в число обследуемых, деталей однозначно характеризующих режимы предшествующей работы локомотива; .
• сравнение температуры обследуемой детали со средней температурой деталей находящихся в одной силовой цепи и т.д.
3. Важнейшие задачи алгоритмического и программного обеспечения:
В рамках реализации этого направления сформулированы следующие важные и сложные задачи, требующие особой научной и алгоритмической проработки и являющиеся ключевыми в проблеме автоматизации периодических термообследований [77,125]:
• автоматическое определение однозначного соответствия между элементами видео- и термоизображения для облегчения чтения и обработки термограмм;
• автоматическое определение однозначного соответствия между элементами текущего видеоизображения (сделанного при текущем обследовании) и элементами базового видеоизображения (эталонного видеокадра), на котором задаются контуры интересующих диагностов деталей.
Автоматическое сопоставление элементов видео- и термоизображений
Необходимость работ по автоматическому определению однозначного соответствия между элементами термо- и видеоизображения (или, калибровка фото- термооптической системы) обусловлена недостаточным разрешением и термоконтрастом термограмм мелких, однотипных деталей.
Данная проблема не актуальна для обследований достаточно больших и легко узнаваемых объектов и узлов - трансформаторов, изоляторов ЛЭП, и т.д. Однако качество обследований снижается, а время анализа термоизображений резко увеличивается при диагностике мелких элементов схем, электрических сборок и увеличении их количества. К ним можно отнести разнообразные контакторы, реле, тиристоры, контактные соединения, шины, жгуты проводов и т.д. Наиболее удобно выделять детали на видеоизображении с автоматическим выделением соответствующих областей на термоизображении (рис.2). При этом
для анализа выделенных областей на термоизображении могут в дальнейшем использоваться стандартные программы обработки фирм-производителей термокамер. Однако, в настоящее время синхронная термо- и фотосъемка проводится лишь некоторыми современными термокамерами для того, чтобы визуально сделать более понятным слабоконтрастное в инфракрасных лучах изображение, причем автоматическое сопоставление областей видео и термокадров не производиться.
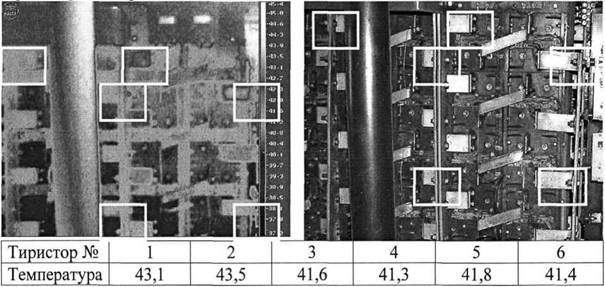
Рис.2. Термограмма (слева) и синхронное видеоизображение ВИП4000 электровоза ВЛ65 с выделением идентичных областей термоконтроля (тиристоров). Ниже указаны максимальные температуры в выделенных областях
Любой метод определения идентичности изображений включает:
• обнаружение характерных точек (деталей, признаков), в качестве которых берутся явно выраженные и отличимые объекты или их черты (замкнутые области, контуры, углы, пересечение линий и т.д.);
• сопоставление характерных точек совмещаемых изображений, т.е. установление попарного соответствия между ними;
• вычисление из найденного соответствия характерных точек параметров отображения одного изображения в другое.
Для определения соответствия между термоизображением и фотоизображением было изготовлено калибровочное поле, которое представляло собой квадрат со сторонами IOxlO точечных светодиодов, расположенных с шагом 6 см, хорошо видимых как в оптическом, так и инфракрасном диапазонах спектра [77]. Выбор и сопоставление характерных точек (т.е. точечных изображений светодиодов) на фото- и термограммах при калибровке производится вручную. В зависимости от степени точности калибровки, дисторсию оптической системы (создаваемой объективом) можно либо не учитывать, либо устранить с использованием существующих методов и программ (например, библиотеки программ Intel OpenCV [272]).
Рассогласование между координатами соответствующих характерных точек на текущем и базовом изображениях задается комбинацией аффинных и проективных преобразований координат. Оптические дисторсии, вносимые объективом камеры, будем считать малыми.
Отображение координат характерных точек фотоизображения в соответствующие координаты термоизображения определяется по уравнениям (5.21)—(5.23), приведенным в разделе 5.4.1, где p0 = [x0>,oJ7 -координаты точки на фотоизображении; p1 =[x1 y,1]r- координаты соответствующей точки на термоизображении. Сопоставление характерных точек видео- и термоизображений калибровочного поля проводится вручную. Для получения однозначных зависимостей между элементами видео- и термоизображений при наличии проективного рассогласования достаточно знать координаты четырех совпадающих точек на каждом изображении. Вследствие эффекта параллакса коэффициенты α1-α8в выражениях (5.22), (5.23) зависят от расстояния от фото- термокамер до сцены. Для экспериментальной системы «цифровая фотокамера Canon А95 - термограф ИРТИС-2000» получены коэффициенты аппроксимирующих полиномов 4-ой степени зависимости значений α1-α8от усредненных расстояний. Расстояние до сцены для каждой пары фото- и видео изображений берется из EXIF данных снимка цифровой камеры. Эксперименты по совмещению фото и термоизображений калибровочного поля для различных расстояний до сцены, в том числе с использованием аппроксимирующих полиномов, показали хорошие результаты.
Автоматическое сопоставление текущего и базового изображений
Автоматическое определение однозначного соответствия между элементами текущего видеоизображения (сделанного при текущем обследовании) и базового видеоизображения (эталонного видеокадра на котором задаются контуры интересующих диагностов деталей) необходимо для организации регулярных периодических термоинспекций большой номенклатуры деталей, сложных электрических сборок. Целью данной операции является учет (компенсация) рассогласований между видеоизображениями одной сцены сделанных в разное время и с несколько различающихся точек и направлений съемки. Полностью устранить рассогласование в момент съемки практически невозможно из-за того, что камеры находятся в руках у оператора. Учет рассогласований позволит выделять диагностируемые детали (их контуры) только один раз на базовом изображении и вычислять где находятся диагностируемые детали в последующих текущих изображениях. Рассмотрим указанные выше составляющие определения идентичности изображений.
Автоматическое сопоставление текущего и базового изображений проводится по описанному ранее в разделах 5.2-5.4 многоступенчатому алгоритму в следующей последовательности:
• автоматически выделяются характерные точки на базовом изображении (разд. 5.2.1);
• на начальном этапе с использованием кросскорреляционной функции на текущем изображении определяется массив точек-кандидатов на совпадение с характерными точками базового изображения (разд. 5.2.2);
• на последующих этапах с использованием релаксационного вероятностного метода (разд. 5.3) и дополнительного метода, использующего проективный инвариант (разд. 5.4) происходит отбор и уточнение точек- кандидатов после которого, каждой характерной точке базового изображения однозначно ставятся в соответствие совпадающие точки текущего изображения. По совпадающим точкам вычисляются коэффициенты преобразования базового изображения в текущее.
Описанные выше методы и алгоритмы сопоставления видео- и термоизображений, текущего и базового видеоизображений реализованы в виде программных модулей на языке программирования C++ и многократно успешно апробированы при обработке видео- и термоизображений при проведении термообследований электрооборудования электровозов ВЛ-80, ВЛ-65 на ПТО депо Иркутск-сортировочный ВСЖД и получены положительные результаты.
Таким образом, проведенные работы по тепловизионному контролю и диагностике оборудования локомотивов доказали перспективность использования предложенной технологии автоматизированного термомониторинга в работах по ремонту и периодическому техническому обслуживанию локомотивов. Тепловизионная диагностика хорошо дополняет вибродиагностику локомотивного парка. Использование автоматизированных технологий обработки тепловизионных данных существенно ускоряет процесс выдачи заключения о техническом состоянии локомотивов. Реализация разработанных методов и алгоритмов сопоставления видео- и термоизображений, текущего и базового видеоизображений позволит создать технологию автоматизированного термомониторинга и диагностики состояния больших массивов мелких и однотипных деталей электрических схем, сборок и др.
Разработанный авторами метод калибровки фото- термооптической системы может использоваться также для облегчения обработки слабоконтрастных термограмм. Предложенный авторами способ последовательного уточнения сопоставления характерных точек базового и текущего видеоизображений с использованием кросскорреляционных функций, релаксационного вероятностного метода в задаче маркировки объектов и использования проективных инвариантных канонических координат позволяет практически безошибочно преобразовывать координаты контуров деталей базового и текущего видеоизображений при некотором рассогласовании точек съемки видеокадров.
Внедрение технологии и программы автоматизации термомониторинга и диагностики электрического и машинного оборудования локомотивов позволит повысить безопасность движения подвижного состава и экономическую эффективность перевозок за счет своевременного выявления и устранения развивающихся дефектов, увеличения межремонтных пробегов локомотивов.
Еще по теме Приложение 5 Автоматизация периодического тепловизионного контроля, мониторинга и диагностики состояния оборудования:
- Применение алгоритмов обработки изображений в задачах распознаваниия образов и тепловизионного мониторинга оборудования
- 5.1 Понятие и сущно сть диагностики. Диагностика статического состояния
- 29. Автоматизация контроля
- Инструменты автоматизации мониторинга изменений на сайтах
- 8. Контроль Банка России за состоянием внутреннего контроля в банках
- 10.2. Использование информационно-коммуникационных технологий для автоматизации работ в области мониторинга и оценки качества предоставления государственных и муниципальных услуг
- применение показателей ферментативной активности в целях мониторинга и диагностики почв Юга России[2]
- Мониторинг состояния экосистем, подверженных опустыниванию
- Механизмом коррекции ПП на основе мониторинга и диагностики
- Мониторинг микробиологического состояния почв
- 13. Компоновка операций и технологического оборудования при автоматизации технологических процессов. Последовательное, параллельное и смешанное агрегатирование
- Инструкция об организации периодического контроля за соблюдением законодательства об охране труда в УЗ «ГОКПЦ»
- Общественный экологический мониторинг и контроль: правовые аспекты
- Экспериментальное оборудование и средства контроля
- 2. Основные понятия и определения: механизация, автоматизация, единичная и комплексная механизация и автоматизация. Стадии автоматизации
- 4.3.Специфика психологической диагностики в исследованиях функциональных состояний
- Применение системы гониометрического контроля при геотехническом мониторинге и результаты исследования
- Описание экспериментальной установки и оборудования для контроля и регистрации параметров
- Описание экспериментальной смесительной установки, средств и оборудования для контроля и регистрации параметров её работы