Приложение 4 Алгоритм распознавания окружностей со случайным поиском для робототехнической системы
Одними из основных для СТЗ мобильных роботов являются проблемы распознавания образов предметов и ориентиров, которые позволяют решать не только технологические задачи (распознавание предметов определенной формы для манипуляции с ними), но и проблемы навигации MP (распознавание искусственных ориентиров определенной формы для определения местоположения робота).
Одной из наиболее распространенных форм распознаваемых СТЗ являются окружности. Форму окружности (на плоскости) или сферы (в пространстве) могут иметь как изделия, с которыми работает промышленный робот, так и искусственные ориентиры, относительно которых определяет или корректирует свое положение мобильный робот. Обнаружение окружностей в цифровом изображении является важной процедурой при распознавании форм предметов и применяется при автоматизации многих технологических процессов, например, для автоматизации процесса наполнения (опорожнения) бочек. По данному цифровому изображеншо требовалось однозначно определить положение наливной горловины.В данном разделе представлены теория, описание и экспериментальные результаты применения алгоритма обнаружения окружностей со случайным поиском. Алгоритм однозначно обнаруживает окружности и дуги окружностей в цифровых изображениях и дает хорошие результаты для изображений с шумом, а также для сложных ситуаций: пересечение, наложение и разрывы в контурах окружностей [97].
Преобразование Хоуга(Hough transform) [273] - наиболее известный подход для распознавания простых примитивов на изображении, в том числе и окружностей. Отличительной особенностью этого похода является отображение пикселей изображения в пространство параметров искомого примитива. Для этого в дискретном пространстве параметров примитива создается суммирующий массив, и отображение каждого пикселя изображения в пространство параметров приводит к увеличению на единицу значений определенного количества ячеек суммирующего массива.
В конце работы алгоритма определяются ячейки суммирующего массива с наибольшими значениями. Параметры, соответствующие значениям выбранных ячеек, считаются параметрами обнаруженных примитивов в изображении. Преобразование Хоуга позволяет достаточно эффективно обнаруживать прямые линии. Но при использовании этого метода для обнаружения окружностей становятся существенными следующие его недостатки:• Окружность, как кривая, описывается следующими параметрами - координатой ее центра (а, Ь) и ее радиусом г. Поэтому суммирующий массив для такого 3-х мерного пространства параметров требует значительного объема машинной памяти.
• Требуются значительные вычислительные ресурсы для выбора ячеек с наибольшими значениями в большом суммирующем массиве.
Для решения указанных проблем было предложено несколько улучшенных методов на основе преобразования Хоуга, но и они не позволяют добиться зна
чительного уменьшения времени вычислений и требуют, как минимум, наличия двумерного суммирующего массива.
1. Алгоритм обнаружения окружностей со случайным поиском
Метод, развиваемый в данном разделе, основан на алгоритме обнаружения окружностей со случайным поиском [226]. Данный метод не требует создания суммирующего массива для учета возможных параметров искомых окружностей, что приводит к значительному уменьшению требований к объему машинной памяти и повышению его производительности. Он эффективно обнаруживает окружности при небольшом или умеренном уровне шума в изображении, а также в большинстве сложных случаев при пересечении или перекрытии окружностей. Метод позволяет также обнаруживать объекты с прерывистым контуром в виде окружности.
Алгоритм работает с контурным бинарным изображением, т.е. изображением в котором выделены пиксели, лежащие на контурах объектов в изображении. Контурное изображение из оригинального цветного изображения получается путем его преобразования в изображение с полутонами серого цвета, и последующей его обработкой алгоритмами выделения контуров.
В результирующем двоичном изображении пиксели изображения со значением 1 соответствуют контурам объектов в изображении.Обозначим множество контурных пикселей как V, куда поместим все единичные пиксели из контурного изображения. При реализации алгоритма множество пикселей Vдолжно позволять выполнять эффективную произвольную выборку и последовательный перебор своих элементов. В дальнейшем все операции алгоритма будут выполняться над этим множеством, а не самим изображением.

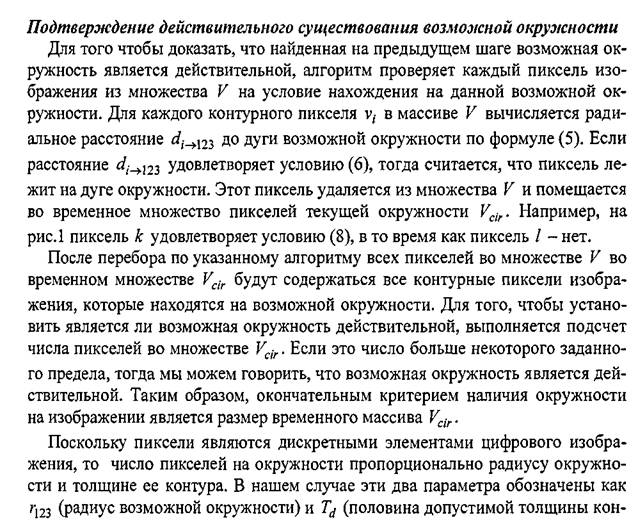
Рис. 1. Определение возможной окружности по четырем пикселям
Алгоритм обнаружения окружностей со случайным поиском основан на следующей идее. Известно, что через любые три произвольно выбранные пикселя изображения, не лежащие на одной линии, можно провести окружность (рис.1). Таким образом, параметры окружности {a,b,r)могут быть вычислены по координатам этих трех пикселей. Если после этого мы случайно выберем четвертый пиксель контура изображения, и он будет также лежать на окружности с параметрами {a,b,r),то мы получим первое доказательство, что такая окружность действительно существует — на ней лежит четыре случайно выбранных пикселя.
Используя данную идею выберем случайно четыре контурных пикселя из множества V. При этом выбранные пиксели удаляются из К и помещаются во временное множество пикселей окружности Vcir.Выясним, лежат ли выбранные пиксели на одной окружности. Три из четырех пикселей (которые назовем опорные пиксели) используются для вычисления параметров возможной окружности - координат центра и радиуса {a,b,r). Для оставшегося пикселя проверяем условие - находится ли он на окружности с вычисленными параметрами.
Уравнение окружности записывается как
Раскрыв уравнение (1) получим уравнение

пиксели 1, 2, 3 на рис.1), не лежащие на одной прямой, может однозначно задать окружность в плоскости изображения.
Так как эта окружность проходит через все три пикселя, тогда мы имеем:
Решая эти уравнения относительно получим параметры
получим параметры
возможной окружности. Эта система уравнений в матричной форме имеет вид

Чтобы опорные пиксели могли задать окружность они не должны лежать на одной прямой. Это условие записывается как

Координаты пикселей на изображении принимают дискретные значения, что приводит к некоторой погрешности вычисления параметров окружности. Если опорные пиксели находятся слишком близко друг к другу, то увеличивается ошибка при вычислении координат центра окружности, а система (3) может стать плохо определенной. Для минимизации указанных негативных эффектов необходимо следить, чтобы любые два опорных пикселя не лежали слишком близко друг от друга. Для этого вводится дополнительное условие на расположение опорных пикселей - расстояние между любыми двумя опорными пикселями должно быть большее некоторого значения Tp.
Согласно алгоритму, последний из четырех случайно выбранных пикселей V4=(x4,y4)должен также лежать на окружности сформированной опорными пикселями vi, V2, V3. Учитывая дискретность координат пикселей, введем условие соответствия их координат уравнению окружности. Расстояние между ду-
гой окружности, заданной опорными пикселями 1, 2, 3, и произвольным пикселем viрассчитывается как

Будем считать, что пиксель viудовлетворяет уравнению окружности (т.е. лежит на ее дуге) если выполняется условие

где Td- некоторое малое расстояние, заданное в пикселях.
Если расстояние, полученное в уравнении (5) для пикселя удовлетворяет условию (6) (см. рис.1), то констатируем, что все четыре случайно выбранных пикселя изображения лежат на одной окружности. Этот факт является первым доказательством того, что окружность с параметрами
удовлетворяет условию (6) (см. рис.1), то констатируем, что все четыре случайно выбранных пикселя изображения лежат на одной окружности. Этот факт является первым доказательством того, что окружность с параметрами возможно
возможно
присутствует на изображении.
Если условие (6) не выполняется, тогда мы возвращаем четыре пикселя из множества Vcirназад во множество Vи снова повторяем шаг случайного поиска возможной окружности. В процессе поиска окружностей будем подсчитывать число неудачных попыток обнаружить окружность. Подсчет неудачных попыток позволит избежать зацикливания алгоритма в случае отсутствия окружностей на изображении.
413
тура). В общем случае число пикселей в окружности будет пропорционально величине 4τrri237j. Для контура малой толщины (Td= 0,5...0,7), число пикселей окружности на изображении будет пропорционально только ее радиусу, а именно: 2τrr123. Для того, чтобы алгоритм мог обнаружить неполные окружности (перекрытые другими объектами) и прерывистые окружности, составленные из участков дуги, число пикселей в окружности может быть меньшим, чем 2tγλj23∙Таким образом, возможная окружность является действительной, если для множества ее пикселей выполняется следующее условие.

где - размер множества Vcir, Tr- является относительным коэффициентом, значение которого меньше единицы.
- размер множества Vcir, Tr- является относительным коэффициентом, значение которого меньше единицы.
Если условие (7) выполняется, тогда мы утверждаем, что обнаружили действительную окружность с параметрами I. Обнаруженная окруж
I. Обнаруженная окруж
ность сохраняется в списке найденных окружностей и начинается новая итерация алгоритма. При этом пиксели из временного множества Vcirудаляются. Благодаря этому размер массива V уменьшается на следующих итерациях, что ускоряет поиск и обнаружение новых окружностей по данному алгоритму.
Если условие (7) не выполняется, тогда мы утверждаем, что возможная окружность таковой не является. В этом случае мы регистрируем неудачную попытку обнаружения, увеличив счетчик неудачных попыток, и возвращаем все пиксели из множества Vcirво множество Vи начинаем новую итерацию алгоритма.
Максимальное число неудачных попыток Aymaxограничивает число итераций алгоритма. Другим условием остановки алгоритма является уменьшение размера множества контурных пикселей ниже некоторого минимального размера
Еще по теме Приложение 4 Алгоритм распознавания окружностей со случайным поиском для робототехнической системы:
- Приложение СНРБ-сети для распознавания изображений
- Глава 3.Приложение СНРБ-сети для распознавания изображений
- Применение алгоритмов обработки изображений в задачах распознаваниия образов и тепловизионного мониторинга оборудования
- 4.3. Алгоритм распознавания номеров автомобилей по изображениям
- Генетические алгоритмы синтеза нейронных сетей для систем управления
- Алгоритмы поиска
- 5.7. Система произвольного числа случайных величин (случайные вектора).
- Вариационный генетический алгоритма для синтеза системы управления с одним критерием оптимизации
- 4.4 Алгоритм поиска адронных струй на основе вейвлет преобразования
- 2.1.4. Построение алгоритма поиска нитей
- 1. Методы выделения сюжетной части изображения в системах распознавания