Вариационный генетический алгоритма для синтеза системы управления с одним критерием оптимизации
С позиции технической формулировки задача синтез системы управления заключается в создании блока управления, работающего на основе реализации принципа обратной связи. Блок управления должен получать с датчиков сигналы, по которым возможно определение состояния объекта управления, и вырабатывать сигналы, по которым создаются управляющие воздействия, обеспечивающие объектом достижение цели управления с минимальным значением некоторого показателя качества.
В задачах синтеза управления необходимо найти обратную связь, которая обеспечивает выработку управляющего внешнего сигнала по состоянию объекта, при этом объект перемещается в заданное целевое состояние, т.е. решается задача достижения цели управления, а величина некоторой оценки качества движения объекта в пространстве состояний принимает минимально возможное значение.
Основным способом решения задачи управления, обеспечивающего достижение цели с минимизацией критерия качества, сегодня является оптимальное программное управление [2, 29]. Задача оптимального управления также включает цель управления и критерий качества управления, который необходимо минимизировать. В отличие от задачи синтеза управления в задаче оптимального управления для объекта строго заданы начальные условия, или они находятся в процессе решения задачи из условий трансверсальности. В результате решения задачи оптимального управления находят управление как функцию времени, т.е.функцию, не зависящую от состояния объекта управления. При реализации такого управления на реальном объекте, как правило, вначале
определяют с помощью моделирования оптимальную траекторию движения объекта в пространстве состояний, а затем с помощью систем регулирования обеспечивают движение объекта в окрестности заданной оптимальной траектории.
В отличие от программного управления, реализуемого в результате решения задачи оптимального управления, в задаче синтеза системы управления начальные условия заданы не одной точкой в пространстве состояний, а в виде области или множества точек в пространстве состояний.
Полученная в результате решения задачи синтеза синтезирующая функция обеспечивает оптимальное перемещение объекта управления из любого начального состояния из данного множества в терминальное целевое состояние. Если начальные условия в задачах оптимального управления и синтеза управления совпадают, то полученная функция дает те же значения управления во времени, что и оптимальное программное управление, полученное в результате решения задачи оптимального управления. В этом смысле решение задачи синтеза управления эквивалентно решению множества задач оптимального управления [2].Задача синтеза системы управления до последнего времени могла решаться только аналитически, так как ее решением является многомерная функция, описывающая зависимость управления от значений вектора состояния объекта. Искомая синтезирующая функция должна определять по состоянию объекта значение управления, обеспечивающего достижение заданной цели, и оптимального с точки зрения заданного критерия качества. аналитическое решение задачи синтеза было возможно только для не сложных объектов, математические модели которых допускали получение аналитического решения, а вид оптимального управления определялся свойствами задачи.
С развитием вычислительной техники и последними достижениями в области алгоритмизации появилась возможность создавать численные методы для нахождения многомерных функций. таким методам следует, прежде всего, отнести метод генетического программирования [40], а также его развитие, метод грамматической эволюции [2, 29] и метод аналитического программирования [2,
29]. Все перечисленные методы позволяют искать с помощью эволюционных алгоритмов математические выражения, закодированные специальными структурами данных. Генетическое программирование использует строку символов, метод грамматической эволюции использует битовые строки, в методе аналитического программирования применяется наборы из целых чисел. Данные методы есть возможность использовать и для решения задачи синтеза системы управления.
Использование перечисленных методов для решения задачи синтеза показало, что из-за огромного пространства возможных решений в виде математических выражений, нахождение решения задачи синтеза требует больших вычислительных затрат.
Разработка специального метода для решения задачи синтеза управления, учитывающего недостатки вышеперечисленных методов, привело к созданию метода сетевого оператора [27], который в качестве структуры данных для описания математического выражения использует целочисленную матрицу.
Метод искусственных нейронных сетей является универсальным методом аппроксимации различных функций. Согласно теоремы рнольда олмогорова [5], в которой утверждается, что «каждая непрерывная функция nпеременных, заданная на единичном кубе n-мерного пространства, представима в виде  где gi(у) - непрерывная функция, hi j. (xj.) - непрерывная и стандартная
где gi(у) - непрерывная функция, hi j. (xj.) - непрерывная и стандартная
функция, не зависящая от выбора аппроксимирующей
не зависящая от выбора аппроксимирующей
функции f (x1,..., xn) », практически любая функция может быть аппроксимирована НС.
Решением задачи синтеза управления для любого объекта является многомерная функция, определяющая значение вектора управления в зависимости от значения вектора состояния объекта управления.
Рассмотрим формальную постановку задачи синтеза управления [2].
Задана математическая модель объекта управления

где хг- компонента iвектора состояния - компонента
- компонента
вектора управления
Заданы ограничения на управление

Задано множество начальных состояний

Задана цель управления в виде терминального n - rмерного многообразия  где tj-- время управления, определяемое выполнением условия
где tj-- время управления, определяемое выполнением условия

 - заданное максимальное время процесса управления, ε - заданная малая
- заданное максимальное время процесса управления, ε - заданная малая
положительная величина.
Задан критерий качества управления
77

где - решение системы (3.2) с начальными условиями x0,3, 1 ≤ j ≤ M.
- решение системы (3.2) с начальными условиями x0,3, 1 ≤ j ≤ M.
Необходимо найти управление с учетом ограничений в виде

где

 - искомая функция управления,
- искомая функция управления,
Для решения задачи используем аппроксимацию искомой синтезируемой функции (3.9) многослойной ИНС 
78

Для обучения НС используем критерий (3.7). В процессе обучения необходимо найти

параметров.
Рассмотрим пример синтеза управления для нелинейной системы управления
Для системы (3.17), (3.18) задано множество начальных значений

Заданы ограничения на управление

Задана цель управления в виде терминального многообразия 
79

Задан критерий качества управления

Для обучения НС используем вариационный генетический алгоритм (ВГ ) [3].
Параметры генетического алгоритма (Г ) приведены на рисунке 3.1.
Рисунок 3.1 - Параметры вариационного генетического алгоритма для обучения нейронной сети
В результате была получена трехслойная нейронная сеть со следующими параметрами:

В процессе поиска нейронной сети при каждом вычислении функционала модель объекта управления (3.16), (3.17) интегрировалась улучшенным методом Эйлера второго порядка с шагом интегрирования 0,001 с.
На рисунке 3.2 приведены решения замкнутой системы управления с полученной нейронной сетью в обратной связи и с учетом ограничений (3.8), (3.20).
л X,π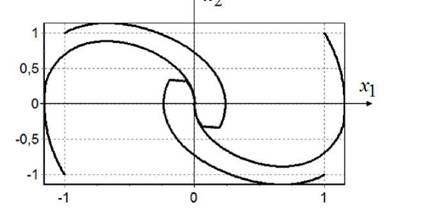
Рисунок 3.2 - Решения замкнутой системы Дуффинга для четырех начальных условий
На рисунке 3.3 приведены решения замкнутой системы управления с полученной нейронной сетью в обратной связи для новых начальных условий, не

Рисунок 3.3 - Решения замкнутой системы Дуффинга для четырех не используемых при синтезе начальных условий
На рисунке 3.4 приведены решения замкнутой системы управления с полученной НС в обратной связи для начальных условий, расположенных дальше от терминальных условий, чем условия, используемые при синтезе: 
На рисунке 3.5 приведены решения замкнутой системы управления с полученной нейронной сетью в обратной связи для начальных условий, расположенных дальше от терминальных условий, чем условия, используемые при синтезе: x0,13= [-2 0]t,x0,14= [2 0]t, x0,15= [θ -2]t x0,16= [θ 2]t.
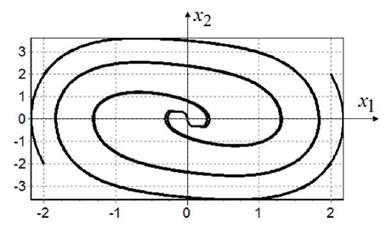
Рисунок 3.4 - Решения замкнутой системы Дуффинга для четырех не
~ 0 9 Г п ∕-,^]T 0 10 Γ-'>используемых при синтезе начальных условий: x,= [- 2 - 2] , x,= [2 - x 01=[- 2 2]t , x 0,12=[2 2]t

Рисунок 3.5 - Решения замкнутой системы Дуффинга для четырех не
используемых при синтезе начальных условий: x0,13= [- 2 0]t , x0,14=
x0,15=[0 - 2]t x0,16= [0 2]t
Как видно из графиков, представленных на рисунках 3.2-3.5, полученная функция управления, аппроксимированная НС, обеспечивает достижение терминального состояния из различных начальных условий.
В таблице 3.1 приведены значения времени и точности достижения терминального состояния для различных начальных условий модели объекта.
Таблица 3.1 - Параметры качества управления
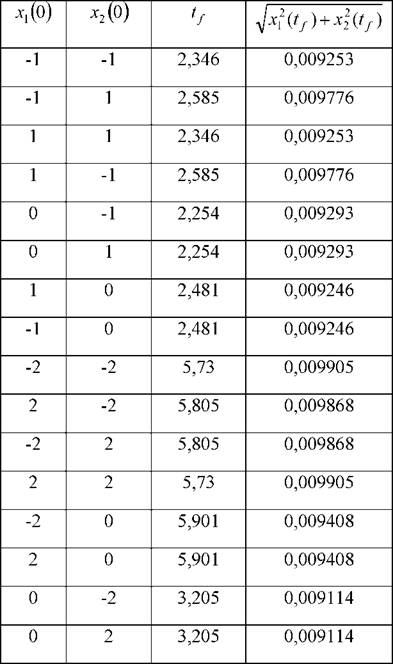
Данные в таблице 3.1 показывают, что объект управления достигает терминального состояния с заданной точностью, не превышающей 0,001.
На рисунках 3.6-3.9 приведены графики значений управления для различных начальных состояний.
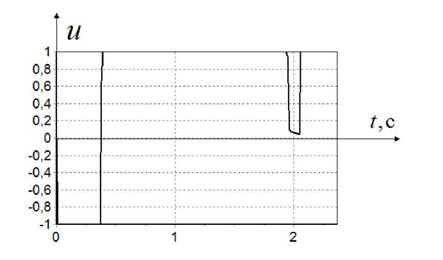
Рисунок 3.6 - Значение управления при начальных условиях: x0,3= [1 1Г
U 1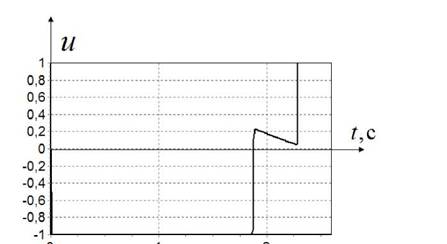 2
2
Рисунок 3.7 - Значение управления при начальных условиях: x0,2= [-1 1]г

Рисунок 3.8 - Значение управления при начальных условиях: x0,7= [1 0Ґ

Рисунок 3.9 - Значение управления при начальных условиях: x0,6= [0 1]t
Из рисунков 3.5-3.9 видно, что управление носит обычный для задач быстродействия переключающий характер между предельными значениями.
3.2
Еще по теме Вариационный генетический алгоритма для синтеза системы управления с одним критерием оптимизации:
- Генетический алгоритма для обучения нейронной сети для вертикализации экзоскелета с одним критерием оптимизации
- Генетические алгоритмы синтеза нейронных сетей для систем управления
- Генетический алгоритма для обучения нейронной сети для вертикализации экзоскелета с двумя критериями оптимизации
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- Алгоритмы оптимизации ряда для изделия с силовым параметром
- Анализ и оценка состояния проблемы синтеза оптимального управления на базе нейросетевого подхода для биотехнических систем реабилитации
- 1.2.7. Генетический алгоритм обучения
- Синтез нейроконтроллера дляч системы управления вертикализацией экзоскилета
- Математическая модель для синтеза управления вертикализацией экзоскелета
- Алгоритм оптимизации ряда изделий с размерным параметром.
- Синтез системы управления вертикализацией экзоскелета методом искусственных нейронных сетей
- Генетическая детерминация в психофизиологии. Воздействие генетических и средовых (эндокринных, сигнальных, психологических) факторов на развитие нервной системы.
- 1.3. Критерии выбора ансамблей псевдослучайных последовательностей для систем с CDMA