Синтез нейроконтроллера дляч системы управления вертикализацией экзоскилета
Вертикализация экзоскелета относится к многосвязным нелинейным системам управления со сложной динамикой. Математическое моделирование движения пациента в экзоскелете показало существенную зависимость траектории движения центра масс системы от параметров PI регулятора.
Для получения заданных показателей качества управляемой механической системы необходимо определение оптимальных параметров нейроконтроллера, обеспечивающих минимальную колебательность устройства и минимальные отклонения от заданной траектории. Для формирования управляющих121 напряжений с учетом корректировки задающих воздействий
с учетом корректировки задающих воздействий
использовался ГА формирования нейроконтроллера. На рисунке 4.9 приведена структурная схема системы автоматического управления с нейроконтроллером, настроенным по гибридному Г .
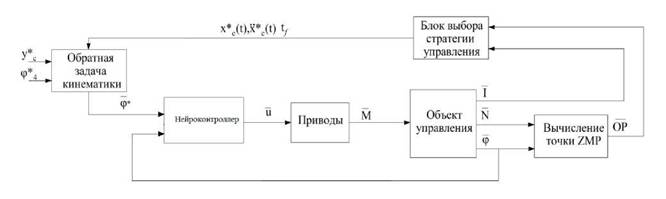
Рисунок 4.9 - Структурная схема системы автоматического управления
экзоскелетом для реабилитации нижних конечностей человека
На схеме приняты следующие обозначения: - вектор
- вектор
углов, задающих координаты экзоскелета в вертикальной плоскости;
 - вектор углов, полученных в результате обработки сигналов с датчиков;
- вектор углов, полученных в результате обработки сигналов с датчиков; - вектор модулей нормальных реакций, измеренных
- вектор модулей нормальных реакций, измеренных
датчиками давления, размещенными на стопах; - вектор
- вектор
управляющих напряжений, подаваемых на приводы - вектор
- вектор
токов, протекающих в обмотках якорей электроприводов моменты, создаваемые электроприводами.
моменты, создаваемые электроприводами.
Для управления приводом экзоскелета использовалась последовательная схема нейронного управления [87, 93].
Результаты апробации представлены на рисунке 4.10 и рисунке 4.11. Анализ графиков на этих показывает, что для обеспечения качественной работы механической системы необходима настройка нейрорегулятора.
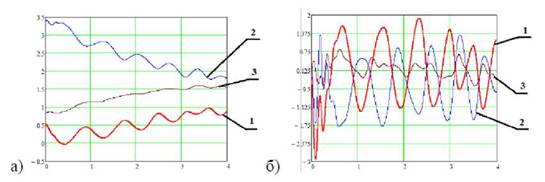
Рисунок 4.10 - Диаграммы изменения обобщенных координат а) зависимость обобщенных координат от времени; б) зависимость обобщенных скоростей от времени;1,2,3 - первая, вторая и третья обобщенные координаты (скорости)
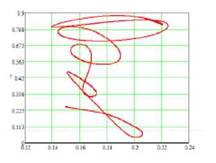
Рисунок 4.11 - Траектория движения центра масс экзоскелета
Графики, показанные на рисунке 4.10, позволяют сделать вывод о высокой колебательности, характеризующей движение механизма при данном наборе весовых коэффициентов нейроконтроллера. Траектория движения центра масс механизма, показанная на рисунке 4.11, позволяет судить о неточности работы системы управления (траектория движения центра масс должна представлять собой вертикальную прямую).
Проведем настройку нейроконтроллера по следующим критериям: 1) снижение амплитуды колебаний, 2) уменьшение ошибки (разницы между желаемым и реальным значениями величин xc, yc, φ3). Для этого запишем выражения, ставящие в соответствие движению системы (полученному в виде численных зависимостей) две скалярные величины, позволяющие оценивать качество работы системы согласно указанным критериям:
123 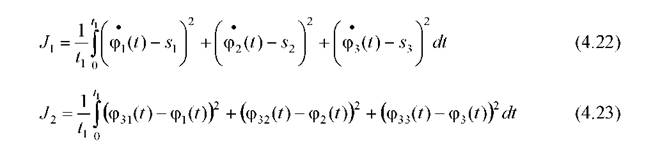 где J1- скалярная величина, квадратично возрастающая при повышении амплитуды колебаний, J2- скалярная величина, квадратично возрастающая при повышении ошибки, Si- среднее функции i-ой обобщенной скорости.
где J1- скалярная величина, квадратично возрастающая при повышении амплитуды колебаний, J2- скалярная величина, квадратично возрастающая при повышении ошибки, Si- среднее функции i-ой обобщенной скорости.

Использование в формуле (4.22) обобщенных скоростей объясняется следующим образом. Величина J1,определяемая по формуле (4.22) возрастает не только при наличии колебаний исследуемых зависимостей, но и при их равномерном возрастании. Равномерное возрастание является нормальным для обобщенных координат; значения же обобщенных скоростей начальный момент времени равны нулю, а в момент времени tiдолжны стремиться к нулю при условии, что механизм следует траектории, заданной уравнениями (4.21). Поэтому использование обобщенных скоростей для оценки колебательности системы является предпочтительным.
начальный момент времени равны нулю, а в момент времени tiдолжны стремиться к нулю при условии, что механизм следует траектории, заданной уравнениями (4.21). Поэтому использование обобщенных скоростей для оценки колебательности системы является предпочтительным.
Таким образом, задача настройки нейроконтроллера сводится к минимизации величин Jiи J2.
Еще по теме Синтез нейроконтроллера дляч системы управления вертикализацией экзоскилета:
- 4.4 Настройка нейроконтроллера системы управления вертикализацией
- Синтез системы управления вертикализацией экзоскелета методом искусственных нейронных сетей
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- Математическая модель для синтеза управления вертикализацией экзоскелета
- Вариационный генетический алгоритма для синтеза системы управления с одним критерием оптимизации
- Генетические алгоритмы синтеза нейронных сетей для систем управления
- Анализ и оценка состояния проблемы синтеза оптимального управления на базе нейросетевого подхода для биотехнических систем реабилитации
- Методы и средства нейросетевого управления для вертикализации экзоскелета
- 2.3. Примеры синтеза оптимального управления
- CMS система - Content Menegment System - Система управления содержимым или, проще говоря, система управления сайтом. Это еще у нас в России иногда называют движком сайта. Вещь полезная :)
- Финансовый менеджмент как система управления. Субъекты и объекты управления.
- методика синтеза понятия «институт» на основе системы детерминант
- Глава 13методика синтеза понятия «институт» на основе системы детерминант
- Финансовый менеджмент как система управления. Место и роль финансового менеджмента в общей системе управления предприятием
- Лекция № 1. Общие сведения о системах автоматического управления и регулирования. Основные принципы управления.
- Разработка методики формирования базы данных для настройки нейроконтроллера экзоскелета
- 67. Система управления — совокупность взаимосвязанных элементов, способ реализации технологии управления, предполагающий воздействие на объект с целью изменения его состояния и процессных характеристик.
- Онтологические проблемы этнокультурных систем: синтез синергетической и семиотической парадигм Ontological priblems ethno-cultural systems: synthesis of synergetic and semiotic paradigms
- Онтологические проблемы этнокультурных систем: синтез синергетической и семиотической парадигм Ontological problems ethno-cultural systems: synthesis of synergetic and semiotic paradigms
- 12. синтаксический уровень языковой системы. Трудные случаи именного и глагольного управления. Управленния при однородных членах предложения. Нанизованиия падежей