Разработка методики формирования базы данных для настройки нейроконтроллера экзоскелета
Измерительный комплекс, предназначенный для измерения углов кинематической модели в процессе вертикализации, представлен на рисунке 2.12. Для измерения углов использовались резистивные потенциометры, размещенные в шарнирах.

Рисунок 2.12 Кинематическая схема измерительного комплекса
Конструктивно измерительный комплекс состоит из жесткой рамы 19, закрепленной к туловищу человека, и жестких звеньев 20, 23; 22, 25; 21, 24, которые крепятся на теле человека при помощи манжет и располагаются параллельно конечностям человека. Звенья связаны с рамой и между собой плоскими шарнирами 1,11; 2, 12; 3,13. Каждый шарнир содержит в себе резистивный потенциометр для измерения относительного угла между звеньями, соединенными этим шарниром. Также на раме и на каждом звене закреплены акселерометры 4, 5, 6, 14, 15, которые позволяют получать данные о положении рамы и звеньев в пространстве в абсолютных углах. На звеньях, параллельных стопам человека, в точках контакта со стопой, размещены датчики давления 7, 8, 9, 16, 17, 18, по три на каждом звене. Управление процессом вертикализации осуществляется блоком электроники 10. Закрепление человека в измерительном комплексе осуществляется с помощью манжет 26.
Фотография человека с установленным комплексом показана на рисунке 2.13 [95].
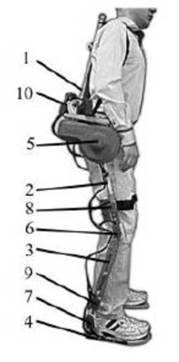
Рисунок 2.13- Измерительный комплекс (общий вид)
Комплекс состоит из жесткой рамы 1, соединенной с туловищем, звена 2, параллельном бедру; звена с регулируемой длиной, параллельном голени; звена 4, параллельном стопе; тазобедренного шарнира 5; коленного шарнира 6; голеностопного шарнира 7; акселерометров 8,9, закрепленных на звеньях; блока электроники 10.
Схема подключения датчиков показана на рисунке 2.14 [95].
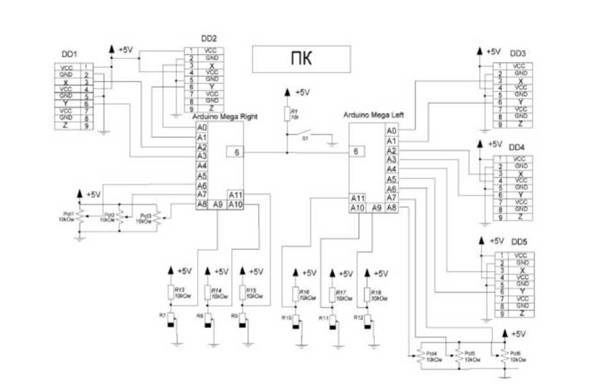
Рисунок 2.14 - Принципиальная электрическая схема измерительной системы: Arduino Mega Right, Arduino Mega Left - контроллеры, снимающие данные с правой и левой частей экзомежурера; R7, R8, R9, R10, R11, R12 - резистивные датчики давления; R1; R13, R14, R15, R16, R17, R18, - резисторы; DD1, DD2, DD3, DD4, DD5 - разъёмы для подключения акселерометров; Pot1, Pot2, Pot3, Pot4, Pot5, Pot6 - потенциометры
В рамках эксперимента исследовалась вертикализация человека в процессе «встал-сел». Измерялись φ, φ - абсолютные углы наклона звеньев. Для
измерения углов использовались акселерометры, потенциометры и обработка видеозаписи эксперимента.
На рисунке 2.15 приведены слайды видеозаписи эксперимента [95].
Эксперименты позволили найти зависимости углов во времени и в дальнейшем использовать их как задающие воздействия в системе нейроуправления.

Рисунок 2.15 Фотографии человека в процессе вставания

Рисунок 2.16 - Абсолютные углы
В качестве примера на рисунке 2.17 приведен график экспериментальныой зависимостей углов φ3(t) в режиме «встал-сел».

Рисунок 2.17 - График экспериментальной зависимости φ3 (t) в режиме
«встал-сел»
Для построения базы данных обучающих выборок использовалась аппроксимация сплайнами временных зависимостей обобщенных координат экзоскелета в процессе вставания. Решение задачи о сплайн интерполяции показала, что удовлетворительный результат может быть получен при использовании сплайнов седьмого порядка.
На рисунке 2.18 приведены временные зависимости φ2(t), φ3(t), φ4(t), полученные путем измерения параметров движения человек в процессе вставания со стула.
68

Рисунок 2.18 - Временные зависимости , полученные в
, полученные в
результате эксперимента
Для аппроксимации φ2(t),φ3(t),φ4(t) в качестве сплайнов использовались полиномы седьмого порядка. Выбор полиномов седьмого порядка обусловлен желанием получить дважды дифференцируемые функции, графики вторых производных которых не имеют разрывов.
Полученные сплайны имеют следующий вид: 
где - коэффициенты полиномов, используемых для
- коэффициенты полиномов, используемых для
составления сплайна.
Для вычисления коэффициентов полиномов используем следующие выражения:

где S2(t), S3(t), S4(t) - сплайны, используемые для аппроксимации зависимостей φ2(t), φ3(t), φ4(t) соответственно.
Графики полученных функций приведены на рисунке 2.19-2.21.
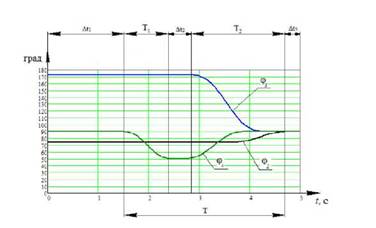
Рисунок 2.19 - Временные зависимости S2 (t), S3 (t), S4 (t) - экспериментальные данные
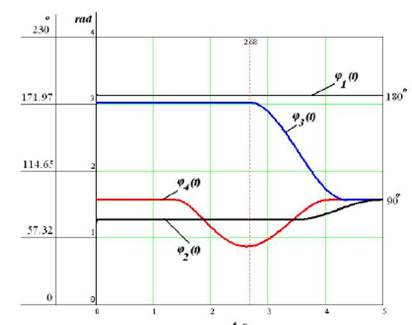
Рисунок 2.20 - Теоретические зависимости углов φ1(t) , φ2(t) , φ3(t) , φ4(t) (сплайн-
интерполяция)
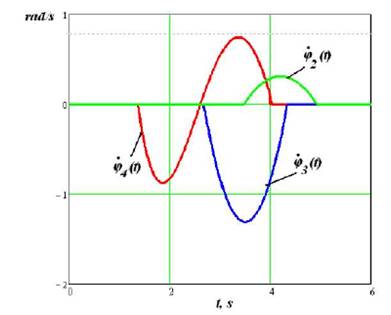
Рисунок 2.21 - График изменения угловых скоростей φ2(t), φ3(t), φ4(t) (сплайн- интерполяция)
Проведенные экспериментальные исследования процесса «встал-сел», позволили получить графики изменения абсолютных углов, определяющих
наклон соответствующих звеньев экзоскелета, а также аналитические выражения, определяющие зависимость углов от времени в виде сплайн - функций.
2.6
Еще по теме Разработка методики формирования базы данных для настройки нейроконтроллера экзоскелета:
- 4.4 Настройка нейроконтроллера системы управления вертикализацией
- 2.6 Формирование базы данных о внутренней и внешней среде организации
- Банки данных, базы данных, базы знаний
- Статья 1296. Программы для ЭВМ и базы данных, созданные по заказу
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- 3.5. Практическая реализация базы данных и базы знаний
- Глава 11 Базы данных и система управления базами данных MS Access
- 3.2. Структура и принципы организации базы данных и базы знаний
- 3.1. Формирование справочно-информационной базы для организации и управления перевозками в сети «Нефтебаза - АЗС»
- Базы данных и системы управления базами данных