Разработка системы управления экзоскелетом в динамическом режиме
Недостатки синтезированного в разделе 2.3 нейроконтроллера обусловлены тем, что соответствие «вход-выход», задаваемое нейронной сетью, является не динамическим, а статическим отображением координат u на φ.
Для обеспечения заданных показателей качества управления нейронная сеть должна подавать на вход объекта управления еще и сигналы, определяемые задержками входа и выхода, то есть нейроконтроллер должен обладать памятью. Схема обучения эмулятора с памятью для схемы реализации инверсной динамики рисунок 2.4 представлена на рисунке 2.7.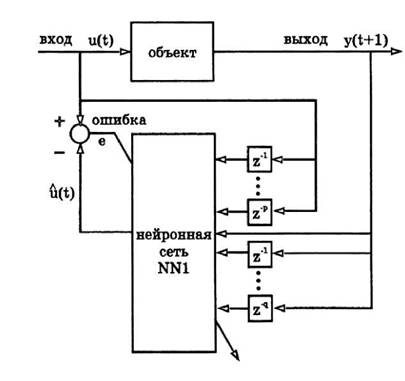
Рисунок 2.7 - Схема обучения эмулятора с памятью
За основу управления вертикализацией экзоскелета выберем включение
ПИД-регулятора, сема которого представлена на рисунке 2.8 [43, 95].
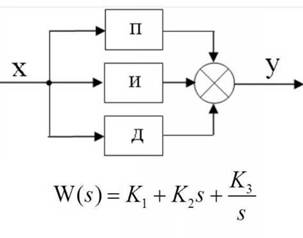
Рисунок 2.8 - Схема включения пропорционального (П) интегрального (И) и
дифференциального (Д) регуляторов в системе управления
Аналог этой схемы в случае нейросетевого управления представлен на рисунке 2.9.

Рисунок 2.9 - Схема нейросетевого управления
лгоритм обучения нейроконтроллера, выполненного согласно схеме, представленной на рисунке 2.9, показан на рисунке 2.10.
В блоке 1 осуществляется настройка нейронной сети NET, которая является аналогом П-регулятора, представленного на рисунке 2.8. Настройка сети осуществляется по алгоритму, представленному в разделе 2.3.
В блоке 2 задается время вертикализации ТВ. За это время пациент с экзоскелетом должен перейти из положения «сидя» в положение «стоя». За время ТВ центр тяжести экзоскелета должен описать некоторую оптимальную траекторию, минимизируя при этом определенный функционал качества.
Если эта траектория является функцией то время вертикализации зависит от частоты дискретизации компонент вектора
то время вертикализации зависит от частоты дискретизации компонент вектора
В блоке 3 формируем оптимизируемый функционал качества J1.
Функционал качества отражает суммарную (интегральную) ошибку отклонения траектории движения центра масс экзоскелета от оптимальной (заданной):

где - шаг дискретизации управляющих сигналов на входах
- шаг дискретизации управляющих сигналов на входах
нейроконтроллера.
В блоке 4 задаем максимальные значения задержки по входному сигналу (p) и выходному сигналу (q). Полагаем, что на начальном этапе системе управления не нужны дополнительные регуляторы, а достаточно одного П-регулятора (блок 5). Блок 6 реализует сам процесс вертикализации, который может быть осуществлен как на натурной, так и на имитационной модели объекта управления. Объект управления - это детерминированный объект, поэтому реализация этого блока может осуществляться сколько угодно раз при различных параметрах нейроконтроллера. освенно он присутствует в каждом блоке настройки нейронной сети NET1, NET2и NET3.
Блок 7 остановит процесс оптимизации ПИД-регулятора, если оптимизируемый функционал достиг допустимого значения J1*.
Блоки 9...12 осуществляют оптимальный выбор весов интегратора NET1. Рост pпрекращается после того как он достиг максимального заданного значения. После этого осуществляется переход на блоки 13.16, которрые повторяют аналогичную процедуру для дифференциатора.

Рисунок 2.10 - Схема алгоритма настройки нейроконтроллера-аналога ПИД- регулятора (начало)
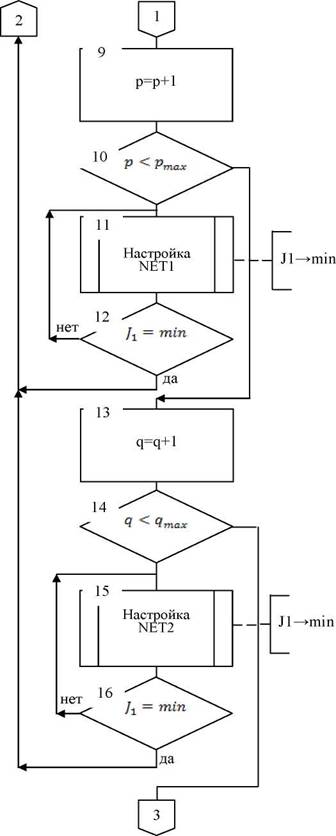
Рисунок 2.10 - Схема алгоритма настройки нейроконтроллера-аналога ПИД- регулятора (окончание)
Если необходимо выполнить оптимизацию по другому функционалу, то используем тот же алгоритм рисунок 2.10, но в блоках 3 и 11, 15 используем соответствующий оптимизируемый функционал.
Таким образом, каждому оптимизируемому функционалу соответствует две нейронные сети, например, функционалу J1соответствуют нейронные сети NET1-1и NET1-2.Для агрегации двух функционалов использовали третий функционал, например, J1+J1=min.Однако, здесь вместо построения алгоритма, аналогичного представленному на рисунке 2.10, целесообразно использовать многослойную нейронную сеть прямого распространения NET3,которую настраиваем по алгоритму обратного распространения ошибки. Схема нейроконтроллера с использованием нейронной сети NET3показана на рисунке 2.11.

Рисунок 2.11 - Структурная схема нейроконтроллера с агрегированием оптимизируемых функционалов
Рассмотренные схемы нейроконтроллеров нуждаются в обучении. Для их обучения необходимо сформировать базу данных обучающих выборок, представляющую из себя совокупность строк с входными векторами и соответствующими функциями цели. Рассмотрим формирование такой базы данных в следующем разделе.
2.3
Еще по теме Разработка системы управления экзоскелетом в динамическом режиме:
- Разработка системы управления экзоскелетом в квазистатическом режиме
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- Пошаговая разработка системы измерений динамической стратегии
- Синтез системы управления вертикализацией экзоскелета методом искусственных нейронных сетей
- 4.2 Исследования движения экзоскелета с пациентом в режиме вертикализации
- Управление с динамической коррекцией упругого манипулятора в классе систем с переменной структурой
- Разработка методики формирования базы данных для настройки нейроконтроллера экзоскелета
- Выбор структурных решений для нейросетевого управления экзоскелетом
- Математическая модель для синтеза управления вертикализацией экзоскелета
- Разработка динамического сепаратора с устройством для дезагрегации частиц
- Методы и средства нейросетевого управления для вертикализации экзоскелета
- Разработка современных российских методов управления в контексте самоорганизации социальных систем Development of modern Russian methods of management in a context of self-organization of social systems
- Экзоскелеты в биотехнических системах реабилитации
- 4.3 Разработка метрологического обеспечения системы диагностирования технического состояния фар автотранспортных средств в режимах «ближний свет», «дальний свет» и «суммарный свет» при реализации стандартного метода измерений.
- Определение рационального режима работы экспериментального динамического сепаратора с дезагрегирующим устройством
- 32. Ликвидация результатов хрущевских реформ. Восстановление старой командно-административной системы управления. Консервация политического режима и персонификация власти.