Управление с динамической коррекцией упругого манипулятора в классе систем с переменной структурой
Известно, что для промышленных роботов (ПР), обладающих конечной и переменной структурной жесткостью и различной инерционностью, время торможения tτи время прекращения колебаний в конце хода tκзанимает, как правило, большую часть от общего времени движения [59].
Уменьшение общего времени перемещения дает существенный выигрыш в быстродействии робота при заданной точности позиционирования.Наихудшими показателями по точности и быстродействию при различных углах поворота в большинстве случаев обладают механизмы поворота руки робота. При повороте руки ПР время прекращения упругих колебаний примерно равно времени перемещения [7,59].
Повысить быстродействие при заданной точности позиционирования можно за счет включения в структуру привода основных движений ПР управляемых механизмов переменной структуры (МПС), реализующих логические законы управления. В работах [59,123] приведены результаты исследования дискретной модели звена ПР (рис.3.16) с дополнительно включенным управляемым механизмом переменной структуры (МПС), разрывающим или восстанавливающим жесткую связь между приводом и основанием консольного упругого звена при реализации алгоритма динамической коррекции его упругого движения
На рис.3.16 ш, mπ- приведенные массы упругого звена и привода; ξ, х- безразмерные координаты привода и звена; c1, b1- жесткость и коэффициент демпфирования упруго-вязкой связи звена с приводом; P - движущая сила привода; bπ- приведенный коэффициент сопротивления, учитывающий потери в приводе; m1, C2, Ь- приведенная масса, жесткость и коэффициент демпфирования механизма переменной структуры (коэффициент демпфирования b при запирании МПС изменяется от b2до ∞.
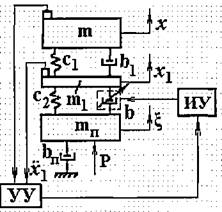
Рис.3.16.
Дискретная расчетная схема звена ПР с механизмом переменной структурыУравнение движения дискретной модели звена ПР будет:
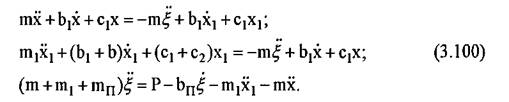
Алгоритм переключения, обеспечивающий динамическую коррекцию име-
198
етвид:
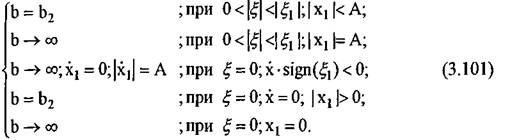
Проведенные исследования на дискретной модели [59] показали эффективность алгоритма (3.101) при перемещении упругого звена в заданную точку позиционирования за минимальное время (при этом сила Pполагалась ограниченной, а уровень остаточных колебаний схвата ПР лежал в диапазоне Δ). Однако в дискретной модели распределенная масса звена и схвата приводилась к сосредоточенной массе т, а изгибная жесткость звена и податливость элементов привода - к жесткости C1, что является достаточно грубым приближением.
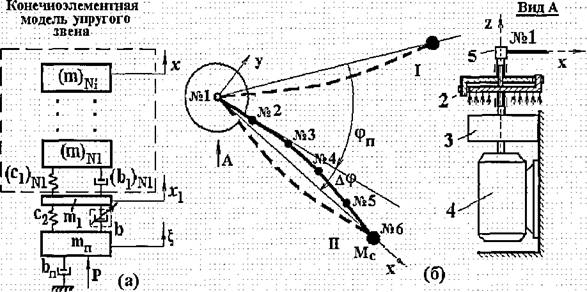
Рис.3.17. Расчетная модель упругого звена с механизмом переменной структуры: а - расчетная схема; б - конструктивная схема привода и МПС
C целью оценки влияния распределенных параметров реального упругого звена на динамику и управление рассмотренной в [59] дискретной модели звена ПР проведено исследование предлагаемого выше алгоритма управления (см. рис.3.17, а).
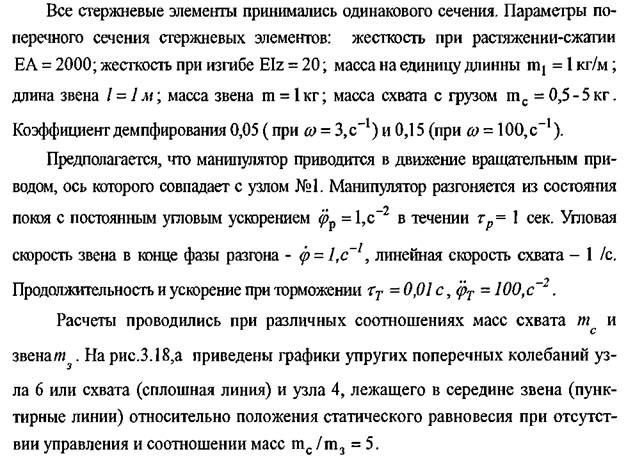
Упругий манипулятор моделируется с использованием метода конечных элементов. В качестве примера возьмем манипулятор с одним упругим звеном массой r∏3,совершающим вращательное движение [122]. На рис.3.17, б приведена расчетная схема упругого звена, совершающим вращательное движение с
помощью привода 1. Консольное звено, в частности, представлено состоящим из 6 узлов и 5 стержневых линейных конечных элементов.
В конце звена, в узле № 6 установлен схват с грузом массой тс. Каждый узел имеет 2 поступательных и 1 вращательную степень свободы.
Число степеней свободы упругой модели звена -16. Граничные условия принимались следующими:• все узлы (кроме узла №1) свободно перемещались в плоскости;
• в узле №1 присутствует только вращательная степень свободы.
На рис.3.17,б между электродвигателем (4), редуктором (3) и осью звена (5) включен контур управляемого механизма переменной структуры, выполненный в виде фрикционного элемента сцепления с ограничителем хода (2). При снятии поперечной нагрузки фрикционный элемент может разрывать связь между звеном и приводом и обеспечивать свободное (в пределах заданного запаса хода) перемещение оси звена относительно привода. Очевидно, что оптимальным по быстродействию будет тот режим работы привода, когда в основное время движения будет производится разгон, а торможение будет интенсивным и кратковременным в конце участка пути. Однако возникающие при этом значительные свободные колебания упругого объекта (схвата в конце звена) ухудшат динамическую точность и общее время перемещения. При этом при резкой остановке возникают большие инерционные нагрузки, которые могут привести к поломкам узлов ПР.
Предлагаемый алгоритм управления (3.101) позволяет производить максимальный разгон практически на всем участке движения (при этом возникают упругие колебания звена), а после мгновенного торможения в конце этапа упругой деформации звена в сторону движения за счет релейного устранения и последующего восстановления связи между приводом и основанием звена перевести его в новое равновесное состояние. При этом упругие свойства звена играют положительную ⅜ роль, снижая ускорение схвата при интенсивном торможении.
На рис.3.17 участки: I- зона разгона; П - зона торможения. На участке разгона возникают упругие колебания звена; на участке позиционирования колебания 1-ой формы переходят в колебания 2-ой формы. При этом энергия упругих колебаний звена переходит из первой формы во вторую (более высокочастотную) форму колебаний, которые рассеиваются более быстро, причем при этих колебаниях конец звена (схват с грузом) остается практически неподвижен.
Это приводит к быстрой стабилизации положения схвата вокруг нового равновесного состояния, координата которого равна пути разгона-торможения плюс амплитуда колебаний по 1-ой форме.Для решения этой задачи между основанием звена и приводом устанавливается механизм переменной структуры, включающий запорное устройство 200
(управляемый демпфер) и ограничитель движения звена. На рис.3.17, б эти два устройства совмещены во фрикционном поворотном механизме, имеющим в отключенном состоянии возможность поворачиваться на ограниченный угол и при срабатывании - замыкающий кинематическую цепь «привод - основание звена» за счет управляемых сил фрикционного взаимодействия (P), создаваемых внешним источником энергии.
Для проверки эффективности работы описанного алгоритма управления был проведен численный эксперимент. Для исследования динамической реакции упругого манипулятора его движение было разложено на 2 составляющие. Первая составляющая движения описывает поведение манипулятора как абсолютно твердого тела, вторая составляющая - упругие колебания звена относительно положения равновесия, определяемого первой составляющей движения. В численном эксперименте рассматривалась лишь вторая, упругая составляющая движения. Силы инерции, которые возникают при движении твердотельной подсистемы манипулятора, рассматривались согласно принципу Даламбера, как возмущающие для упругой подсистемы. Уравнения равновесия системы конечных элементов, находящихся в состоянии движения, будут иметь вид:

где - соответственно матрицы масс, демпфирования и жесткости;
- соответственно матрицы масс, демпфирования и жесткости;
{R}-вектор внешней узловой нагрузки (сил инерции); • векторы
• векторы
узловых перемещений, скоростей и ускорений ансамбля конечных элементов.
При расчете конечноэлементной модели использовался конечноэлементный пакет программ COMPASS [19] и специально созданная программа LINDINT, написанная на языке Fortran-90, в которой конечноэлементные уравнения движения упругой подсистемы численно интегрируются при помощи θ - метода Вильсона [10].
На начальном этапе работы программы производится инициализация исходных данных и задание шага и начальных условий для численного интегрирования. Задается интервал времени интегрирования и шаг по времени Δ t. При инициализации с помощью конечноэлементного пакета программ COMPASS создается расчетная схема, вводятся исходные данные, загружаются матрицы жесткости (файл SMATR.INT) и масс (файл MMATR.INT) упругой системы. Матрицы хранятся в компактном ленточном виде, поэтому также загружается и массив адресов диагональных элементов матриц (файл SARDCOL.INT). Матрица демпфирования вычисляется согласно модели демпфирования Релея в ви-
де линейной комбинации матриц жесткости и масс:

где а и β - коэффициенты, методика вычисления которых приведена в работе [10]. Для вычисления вектора внешних сил, действующих на упругую систему на каждом шаге, модуль интегрирования вызывает пользовательскую процедуру FUNFU, которая предварительно вычисляет текущие ускорения твердотельной подсистемы, а затем - силы инерции. Подпрограмма STIFF_MODIFY реализует заданный алгоритм управления за счет изменения жесткости системы и вычисляет новые значения матрицы демпфирования и передает команду в модуль интегрирования на обновление значений матрицы жесткости [С]
На графиках смещения, скорости и ускорения конца схвата видно, что уже на участке разгона звено начинает совершать упругие колебания первой формы. Эти колебания занимают значительное время и после остановки, т.е.
при t > 1,01 с, снижают точность и быстродействие манипулятора. На графиках скоростей и ускорений видно, что наряду с колебаниями первой формы при резком торможении в середине звена возникают также быстрозазухающие колебания второй формы.Здесь же, на рис.3.18,б приведены аналогичные графики упругих колебаний при управлении структурой по алгоритму (3.101). После участка разгона и
интенсивного торможения (при t > 1,01 с) происходит упругая деформация консоли. В точке максимальной деформации (при равенстве нулю скорости конца звена) срабатывает МПС, и скачком нарушается жесткая связь между валом привода и осью консоли (т.е. узел 1 получает вращательную степень свободы). Поэтому почти вся энергия упругих колебаний звена переходит из 1-ой во 2-ую форму, при которой схват остается практически неподвижным.
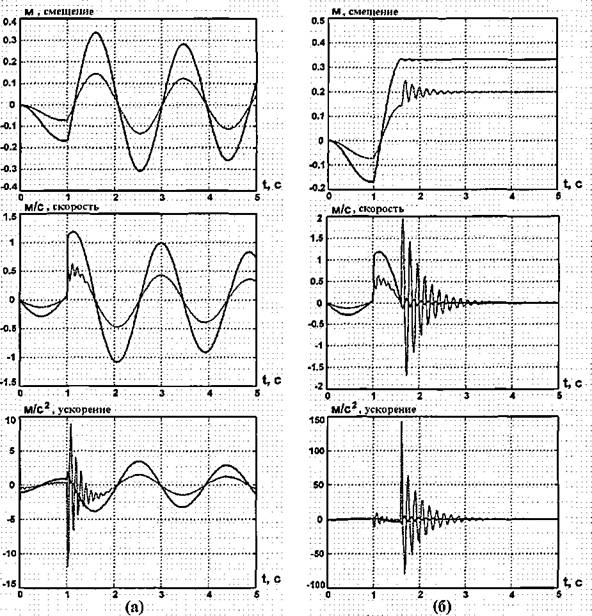
Рис.3.18. Упругие колебания (смещение, скорость и ускорение) конца и середины звена ПР (а); те же колебания при переключении структуры (б) при mc∕m3 = 5.
На рис.3.18,б хорошо видно, что колебания конца звена (схвата) при достижении максимальной деформации (t = l,6c) почти мгновенно прекращаются (при этом изменяется нейтральное положение схвата), в то время как высокочастотные колебания середины звена в момент устранения связи резко возрас-
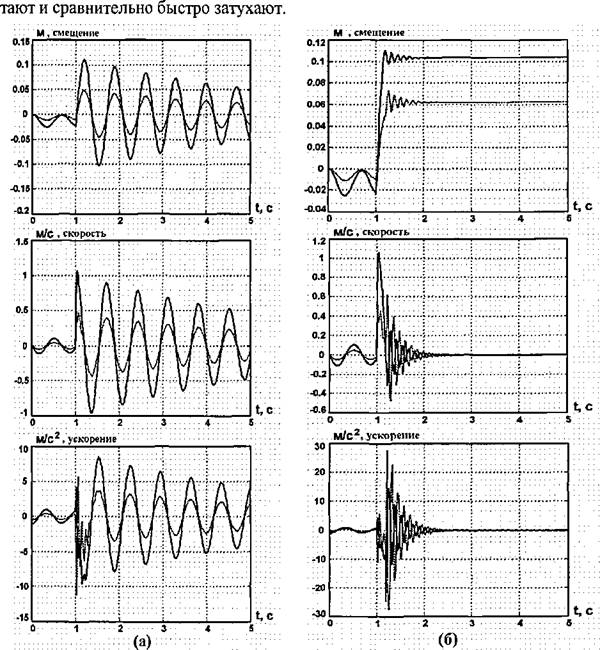
Рис.3.19. Упругие колебания (смещение, скорость и ускорение) конца и середины звена ПР (а); те же колебания при переключении структуры (б) при mc∕m3 = 0,5
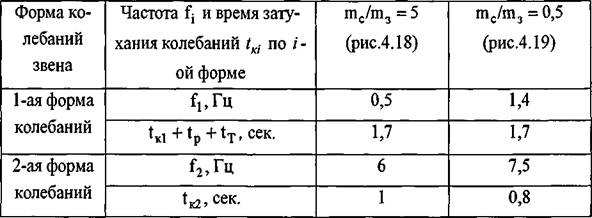
В табл. 3.3 приведены частота собственных колебаний упругого звена и время их затухания (до 5% от первоначальной амплитуды) при различных соотношениях масс схвата и звена.
На рис.3.19 приведены те же графики, но при соотношении масс схвата и звена mc∕m3 = 0,5. В этом случае колебательные движения 1-ой формы затухают медленнее, но, учитывая увеличение частоты колебаний, суммарное время перемещения останется неизменным.
Таким образом, предлагаемый способ управления может применяться на
упругом манипуляторе при разных соотношениях масс звена и схвата с грузом.
Таблица 3.3. Результаты моделирования движения упругого звена
3.6.
Еще по теме Управление с динамической коррекцией упругого манипулятора в классе систем с переменной структурой:
- Управление манипулятором с переменной структурой
- Задачи динамики и управления движением нелинейных стержневых систем и упругих манипуляторов
- Приложение 2 1. Экспериментальная установка - упругий манипулятор FLEBOT-II.
- Методика формирования уравнений динамики упругого манипулятора
- Методика решения обратной задачи кинематики упругого манипулятора
- Постановка обратных задач кинематики и динамики упругих манипуляторов
- Численное моделирование динамики нелинейных упругих стержневых систем с переменными инерционными и жесткостными параметрами
- 3.4.2.Экспериментальная проверка методики решения обратной задачи кинематики на пространственном упругом манипуляторе
- Математические модели упругих манипуляторов мобильных роботов с учетом нелинейных свойств
- Разработка системы управления экзоскелетом в динамическом режиме
- Численное и экспериментальное моделирование методики решения обратной задачи кинематики на пространственном упругом манипуляторе