Разработка системы управления экзоскелетом в квазистатическом режиме
В качестве нейросетевого управления использовалась последовательная схема нейросетевого управления. Для реализации этой схемы управления нейронная сеть должна обеспечить обратную динамику объекта управления.
Сущность реализации обратной динамики иллюстрирует схема, представленная на рисунке 2.4. В этой схеме сначала настраивают NET1, а затем ее копируют в NET2 согласно схеме на рисунке.
Рису
нок 2.4 - Схема реализации инверсной динамики с помощью нейронных сетей
Если обозначить соотношение между входом и выходом нейронной сети
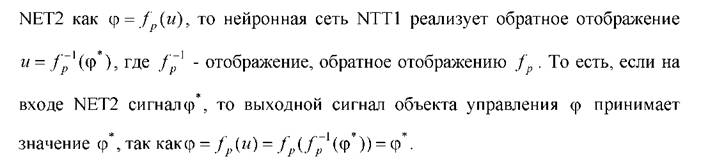
Однако в схеме рисунок 2.4 для обучения NET2 нельзя применить классический метод обратного распространения ошибки с аналитически заданным градиентом, так как между выходом системы управления и выходом NET2 стоит объект управления, якобиан которого в общем случае неизвестен [87, 93]. Поэтому приходится применять численные методы аппроксимации якобиана системы или модифицировать метод обратного распространения ошибки с учетом отсутствия информации о якобиане системы. В связи с этим было принято решение использовать схеме специализированного обучения [87, 93]. Фрагмент этой схемы показан на рисунке 2.5.

Рисунок 2.5 - Фрагмент схемы специализированного обучения
Если известна математическая модель объекта, то, решив соответствующую систему дифференциальных уравнений численными методами [27], получаем пары координат [u(t), φ(t)], которые будем использовать для настройки нейронной сети NET1, которая в данном случае будет являться эмулятором объекта управления. Однако после настройки не представляется возможным использовать эту нейронную сеть в последовательной схеме нейросетевого управления, так как для этого необходима нейронная сеть, отражающая инверсную, а не прямую, как в данном случае, динамику объекта управления.
Для инверсии нейронной сети NET1 используем нейронную сеть встречного распространения (ВР), которая является универсальным инвертором [100].Сеть ВР состоит из двух слоёв: слоя Кохонена и слоя нейронов Гроссберга (рисунок 2.6). На вход сети поступает пара векторов φ и и . На выходе получаем их копии φ и U.
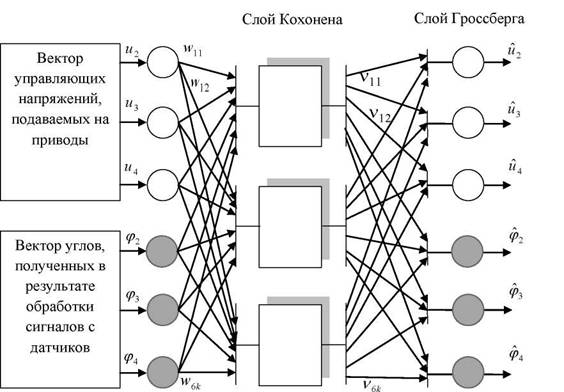
Рисунок 2.6 - Сеть встречного распространения ошибки
Если предварительно обученную ВР включить в последовательную схему нейросетевого управления, то она на выходе все равно будет отображать пару векторов φ и и несмотря на то, что на входе будет присутствовать только один вектор φ. Использование сети ВР в последовательной схеме нейросетевого управления по схеме специализированного обучения обуславливается её уникальной способностью порождать функцию и обратную к ней. Следовательно, после обучения сети имеется возможность предъявлять на её вход только вектор φ, заполняя вектор и нулевыми элементами, получая при этом на выходе вектор управляющих напряжений, на который настроена нейронная сеть. При этом размерности векторов φ и и могут не совпадать, что характерно для многосвязных систем управления.
Формат данных в обучающей выборке для обучения сети ВР представлен в таблице 2.1. В строке этой таблицы представлен соответствующий пример, который подаётся на вход сети Кохонена при обучении сети ВР.
Таблица 2.1 - Формат данных в обучающей выборке для обучения сети встречного распространения ошибки
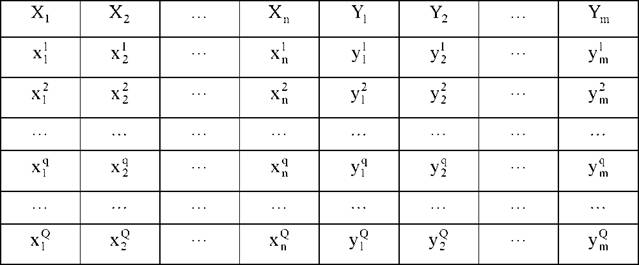
В результате обучения входные векторы ассоциируются с выходными. Если сеть обучена, то подача входных векторов приводит к получению данных на выходе. Выходной вектор, соответствующий правильному решению, может быть получен и тогда, когда вход является неполным или неверным.
В базе данных обучающих выборок сети ВР должны храниться примеры, полученные в результате решения системы дифференциальных уравнений модели или полученные на основе экспериментальных исследований экзоскелета.
Сеть ВР работает в двух режимах: обучение и использование. В первом режиме на входы подаём и вектор X, и вектор Y, корректируем веса; во втором режиме на вход уже обученной сети подаём X или Y, а с выхода снимаем и X, и Y.
Алгоритм функционирования сети: на вход подаём первый образ Z.
Образ Z формируется как:

В каждом нейроне k слоя Кохонена рассчитывается активация

Только на выходе одного нейрона j слоя Кохонена будет единица, а именно

Веса, связанные с выигравшим нейроном, наиболее близки к компонентам входа. Далее осуществляется коррекция весовых коэффициентов, рёбра которых соответствуют выигравшему нейрону.
Слой Гроссберга функционирует подобно слою охонена. ктивация нейрона gего слоя

На выходе нейронов слоя Гроссберга присутствуют веса, соответствующие «выигравшему» нейрону слоя Кохонена
В результате многократного выполнения указанной процедуры весовые коэффициенты слоя Гроссберга должны совпадать или быть достаточно близкими к входным образам.
Исходные данные представлены в таблице экспериментальных данных (ТЭД) и один входной образ соответствует одной строке этой таблицы.
лгоритм функционирования сети ВР включает вулючает следующие семь пунктов.
П. 1. Нормирование каждого элемента ТЭД. Например, нормированный аналог z∖второго элемента первой строки ТЭД рассчитываем по формуле  В ТЭД каждый элемент заменяется на нормированный.
В ТЭД каждый элемент заменяется на нормированный.
П. 2. Генерируются случайным образом весовые коэффициенты сети охонена.
П. 3. На вход сети подается строка матрицы Z и рассчитывается скалярные произведения с векторами весов, которые связаны со всеми нейронами охонена.
П. 4. Среди всех скалярных произведений выбираются наибольшие.
П.5. Подстраиваются веса соответствующего нейрона согласно выражению
 - предыдущее значение веса,
- предыдущее значение веса, - его новое значение, а - коэффициент обучения. Выход нейрона - победителя равен единице, всех остальных - нулю.
- его новое значение, а - коэффициент обучения. Выход нейрона - победителя равен единице, всех остальных - нулю.
П. 6. Корректируются все веса слоя Гроссберга в соответствии с выражением:

где β- коэффициент обучения, Z j- j-ая компонента реального вектора выхода, Vijθ- старое значение весового коэффициента слоя Гроссберга, Vijh- новое значение, 
П.7. Уменьшаются значения а и β .
П. 8. Повторяются п.п. 3...7 до тех пор, пока каждый образ из обучающей выборки не будет порождать аналогичный образ на выходе.
Таким образом, предложена новая структура последовательной схемы нейросетевого управления, построенная по схеме специализированного обучения с использованием нейронной сети встречного распространения ошибки в качестве нейроконтроллера. Схема нейросетевого управления апробирована на прототипе экзоскелета при управлении вертикализацией пациента.
2.2
Еще по теме Разработка системы управления экзоскелетом в квазистатическом режиме:
- Разработка системы управления экзоскелетом в динамическом режиме
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- Синтез системы управления вертикализацией экзоскелета методом искусственных нейронных сетей
- 4.2 Исследования движения экзоскелета с пациентом в режиме вертикализации
- Разработка методики формирования базы данных для настройки нейроконтроллера экзоскелета
- Выбор структурных решений для нейросетевого управления экзоскелетом
- Математическая модель для синтеза управления вертикализацией экзоскелета
- Методы и средства нейросетевого управления для вертикализации экзоскелета
- Разработка современных российских методов управления в контексте самоорганизации социальных систем Development of modern Russian methods of management in a context of self-organization of social systems
- Экзоскелеты в биотехнических системах реабилитации