Генетический алгоритма для обучения нейронной сети для вертикализации экзоскелета с одним критерием оптимизации
Для управления динамическими объектами используют нейронные сети [23, 60, 91, 98]. Разработку ГА для обучения НС для системы управления вертикализации экзоскелета начнем для одного оптимизируемого критерия по классическому ГА.
Структурная схема этой НС представлена на рисунке 3.10. Схема является упрощенной копией схемы нейросети, представленной на рисунке 2.11. При настройке такой сети используем гибридный алгоритм, который предусматривает комбинацию алгоритмов генетического типа и вариационного алгоритма настройки НС.Полагаем, что в процессе работы Г необходимо получить максимальные значения параметров pи qнейронных сетей NET1и NET2и весовые
коэффициенты на входе нейронной сети NET3 w1 w2 w3.
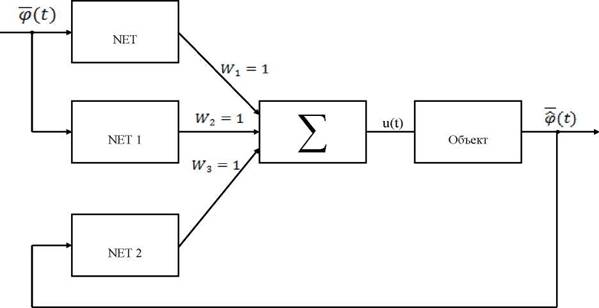
Рис унок 3.10 - Структурная схема синтезируемой нейросети с одним оптимизируемым критерием
Так как нейронная сеть (нейроконтроллер) в данном случае моделирует ПИД-регулятор, то модель ПИД-регулятора реализуется посредством рекуррентной нейронной сети с элементами задержки по входу и по выходу. Динамика модели этой нейронной сети описывается следующим уравнением:
y(n +1) = F(y(n),...,y(n- q +1), x(n),...χ(n- p +1)), (3.25)
где y(n),y(n-1),...,y(n- q +1) - значения выходного сигнала в предшествующие моменты времени, от которых зависит выход модели y(n +1); x(n),...χ(n- p +1) - текущее и предыдущее значение входного сигнала; F-некоторая нелинейная функция своих аргументов.
Для реализации модели (3.25) посредством НС в простейшей конфигурации, то есть в виде однослойного персептрона с линейной функцией активации, необходимо определить весовые коэффициенты однослойного персептрона, то есть множество

НС настраивается по некоторому критерию, который необходимо минимизировать.
В качестве такого критерия может быть принят минимум среднеквадратической ошибки, например, отклонения реальной траектории вертикализации экзоскелета от заданной или оптимальной:
где N-число дискретных отсчетов на траектории вертикализации экзоскелета.
Таким образом, задача состоит в определении конкретных значений элементов упорядоченного множества (3.26), которые бы минимизировали функционал (3.27). Эта задача может быть решена посредством классического Г , в котором (3.27) используется в качестве функции приспособленности, а в качестве генов хромосом популяции используются весовые коэффициенты множества (3.26). Весовые коэффициенты кодируются либо двоичным кодом, либо кодом Грея. Сформировав начальную популяцию из случайных комбинаций аллелей элементов множества (3.26), и путем формирования новых популяций посредством генетических операторов скрещивания и мутации, определяется хромосома, обеспечивающая минимизацию функционала (3.37).
Однако это справедливо при условии, что мощности подмножеств множества (3.26) известны. Но при синтезе рекуррентной НС, как правило, не известны ни р, ни q.Следовательно, вариационный ГА для синтеза
нейроконтроллеров на основе рекуррентных НС использовать не представляется возможным.
Рассмотрим предложенный нами гибридный ГА, который позволяет преодолеть эти трудности.
На первом шаге сформируем популяцию путем случайного выбора параметров рекуррентной сети p, qи w0.Эту популяцию можно представить в виде таблицы 3.2. Кроме того, необходимо выбрать допустимые параметры оптимизируемого критерия. Это необходимо для селекции получемых в результате использования генетических операторов особей.
Таблица 3.2 - Формат исходной популяции генетического алгоритма
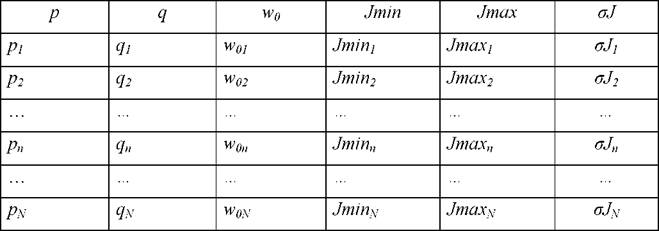
Таблица 3.2 записана для Nобразцов (особей) в исходной популяции.
Номер особи в популяции кодируется нижним индексом. аждая особь исходной популяции дает свою производную исходную популяцию. В таблице 3.3 представлена производная исходная популяция для особи №1 из таблицы 3.2.Таблица 3.3 записана для Mобразцов (особей) в исходной производной популяции. Номер особи в популяции кодируется верхним индексом.
Таблица 3.3 - Формат исходной производной популяции для особи №1 из исходной популяции таблицы 3.2
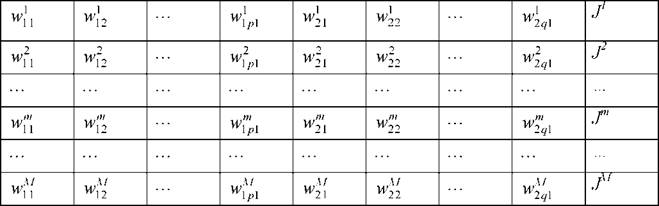
Для каждой строки таблицы 3.2 формируется своя производная исходная популяция. В последнем столбце таблицы 3.3 записывается значение функции приспособленности для соответствующей особи, которая рассчитывается согласно (3.27).
Для каждой производной исходной популяции реализуется вариационный ГА [77, 85]. Результатом работы этого алгоритма является создание
родительского пула. Родительский пул характеризуется тремя показателями функции приспособленности: минимальное значение функции
приспособленности Jmin,максимальное значение функции приспособленности Jmax и среднее квадратическое отклонение σJфункции приспособленности в родительских пулах производных популяций. Эти значения записываются в три последних столбца таблицы 3.2 для соответствующей особи, производной популяцией которой являются особи таблицы 3.2.
Лицо, принимающее решение (ЛИР), анализирует третьи столбцы родительского пула таблицы 3.2 и по результатам этого анализа формирует из них базовый пул, каждая особь которого оптимизируется посредством гибридного Г . Сущность гибридного ГА заключается в следующем. Из трех показателей функции приспособленности формируется оптимизируемый критерий JJ, например,
90

где a1, a2, a3- эмпирически подбираемые положительные коэффициенты.
После этого приступают к последовательному варьированию параметров особей из базового пула таблицы 3.2 в следующей последовательности. Выполняется вариация параметра pпервой базовой особи и переход к вариационному Г согласно производному родительскому пулу таблицы 3.3. нализируется критерий JJродительской производной популяции первой особи. Если вариация pприводит к увеличению (уменьшению) критерия JJ, то продолжается его вариация в сторону увеличения (уменьшения) этого критерия.
Процесс циклического применения вариационного Г и вариация параметра pповторяются, пока вариация этого параметра приводит к увеличению критерия JJ. Если критерий JJбольше не увеличивается, то в соответствующие столбцы записываются показатели Jmin1, Jmax1, σJ1и осуществляются аналогичные процедуры «вариационный генетический алгоритм» для параметров qи w0.После этого возвращаемся к процедуре «вариация плюс классический генетический алгоритм» для параметра pи так до тех пор, пока вариации этих трех параметров прекратят вызывать увеличение (уменьшение) JJ. Затем осуществляем переход к следующей особи таблицы 3.2. Алгоритм заканчиваем после того, как в таблице 3.2 останется только одна особь.
Реализовать гибридный Г можно различными способами. Способы отличаются правилами наращивания порядков задержек в нейронных сетях NET1 и NET2.На рисунке 3.11 представлена схема гибридного ГА, реализующий способ наращивания задержек по правилу «пока результат не станет хуже».
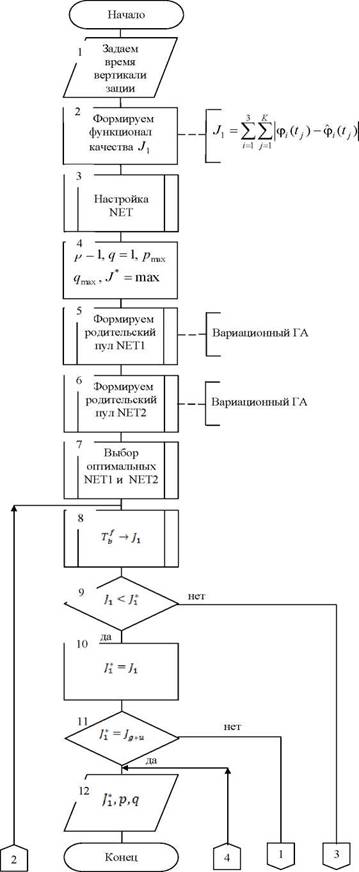
Рисунок 3.11 - Схема гибридного генетического алгоритма (начало)
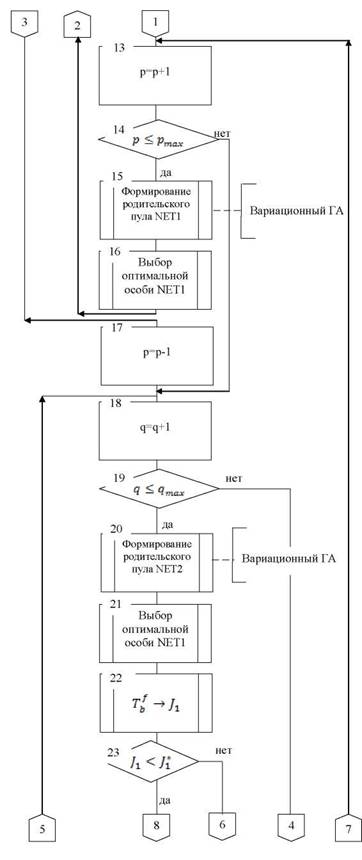
Рисунок 3.11 - Схема гибридного генетического алгоритма (продолжение)
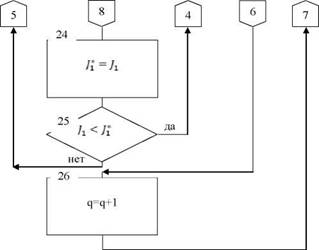
Рисунок 3.11 - Схема гибридного генетического алгоритма (окончание)
Сущность этого правила состоит в том, что задержки входного сигнала наращиваются до тех пор, пока оптимизируемый критерий не прекращает улучшаться.
Тогда начинают наращивать задержки выходного сигнала до тех пор, пока оптимизируемый критерий не прекращает улучшаться. Затем переключаются на наращивания задержек во входном сигнале и так переключаются до тех пор, пока не будет достигнут требуемый критерий качества или не будет исчерпан допустимый предел задержек.Алгоритм рисунок 3.11 работает следующим образом. В блоках 1-4 задаются исходные параметры выполнения алгоритма. Причем априорно полагаем, что минимальное количество задержек по входу и по выходу равно единице. В блоках 5, 6 формируем родительские пулы НС NET1и NET2,а в блоке 7 из родительских пулов выбирают НС с оптимальной структурой. Блок 8 реализует процесс вертикализации. На его выходе получаем значение оптимизируемого критерия. Этот критерий сравнивается с предшествующим критерием. Если он изменился в «правильную» сторону, то сравниваем его с допустимым критерием, и, если он меньше допустимого, то процесс оптимизации прекращаем (блок12). Если критерий не достиг требуемого значения, то осуществляется переход на блок 13. Блоки 13-16 выполняются в цикле до тех пор,
пока критерий не достигнет требуемого значения, или не изменится в «не правильную» сторону. В этом случае осуществляется отступ на шаг назад (блок 17) и переход на увеличение задержек по выходному сигналу. Блоки 18 -26 для выходного сигнала аналогичны блокам 13-17 и 8-10 для входного сигнала.
3.3
Еще по теме Генетический алгоритма для обучения нейронной сети для вертикализации экзоскелета с одним критерием оптимизации:
- Генетический алгоритма для обучения нейронной сети для вертикализации экзоскелета с двумя критериями оптимизации
- Вариационный генетический алгоритма для синтеза системы управления с одним критерием оптимизации
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- 2.2 Алгоритм обучения нейронной сети для ускоренной сходимости обучения
- Генетические алгоритмы синтеза нейронных сетей для систем управления
- 3.1 Алгоритм обучения нейронной сети.
- Математическая модель для синтеза управления вертикализацией экзоскелета
- Методы и средства нейросетевого управления для вертикализации экзоскелета
- Синтез системы управления вертикализацией экзоскелета методом искусственных нейронных сетей
- 1.2.7. Генетический алгоритм обучения
- 3.1.2 Результаты обучения нейронной сети.
- Алгоритмы оптимизации ряда для изделия с силовым параметром
- 2.2.1. Обучение радиальных нейронов СНРБ-сети.
- Общая схема обучения нейронной сети
- 2 Разработка топологии искусственной нейронной сети для задач выделения сюжетной части изображения