Реализация навыка отслеживания с помощью программного визуального серворегулятора
Рассмотрим вариант реализации навигационного навыка отслеживания направляющей линии на полу с использованием программного визуального серворегулятора. Конфигурация экспериментального мобильного робота и связь между его локальной и глобальной системами координат изображены на рис.4.10 и рис.4.2 [103,110].
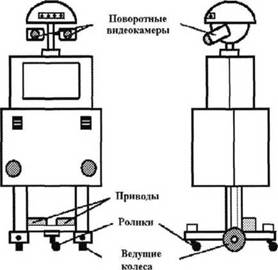
Рис.4.10. Конфигурация экспериментального мобильного сервисного робота.
Видеосистема робота состоит из двух поворачивающихся видеокамер, установленных на вращающейся платформе (голове). Основные кинематические параметры мобильного робота и параметры его видеокамер представлены в табл. 4.1.
Таблица 4.1
| Расстояние между колесами, D D | 0.4 м |
| Диаметр колес, d | 0.1 м |
| Высота камер над уровнем пола | 1.05 м |
| Угол обзора видеокамер (гориз. ? верт.) | 45° х 35° |
| Эффективное фокусное расстояние, f | 4.307 мм |
| Размеры пикселя ПЗС сенсора камеры, Du, Dv | 1/4.75; 1/5.55 пикс/мкм |
| Соотношение геометр, размеров ПЗС сенсора, su | 0.8332 |
| Главная точка изображения, (w0,v0) | (233.55, 39.88) |
Задачей визуального сервоуправления является создание регулятора с зако-
ном управления скоростями приводов и минимизирующим абсолютное значение рассогласования (сигнала ошибки) e = yrf- у между заданным у^и текущим у значениями вектора параметров, вычисляемых системой технического зрения (рис.4.11).
В общем случае вектор и включает в себя все скорости приводов (задача следования робота за объектом с использова
(задача следования робота за объектом с использова нием видеокамеры), но в большинстве случаев используется его сокращенный вариант - скорость движения начала системы
- скорость движения начала системы
координат робота (точки Р) в направлении, перпендикулярном оси колес.
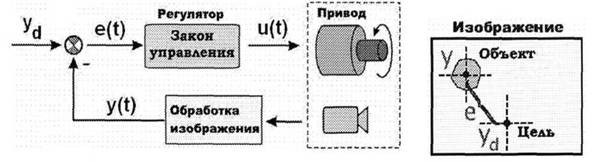
Рис.4.11. Визуальный сервоконтур и вычисление сигнала ошибки.
Регулятор контура визуального сервоуправления обычно имеет пропорциональный или пропорционально-дифференциальный закон управления. Следует заметить, что прямое использование пропорционально-дифференциального закона ограничено низкой частотой поступления видеокадров в систему машинного зрения (для стандарта NTSC эта частота равна 30 кадрам в секунду (период = 33 мсек). В результате увеличивается время квантования цикла управления (Δ∕ >33 мсек) и вычисление производных вектора ошибки е для быстро двигающихся в кадре объектов выполняется с большими погрешностями, что сказывается на устойчивости управления. Для решения указанной проблемы можно использовать прогнозирующую модель для получения непрерывного закона изменения у(/), с уточнением модели на основе получаемых дискретных значений у. Подобная модель может быть построена, например, с использованием фильтра Калмана. При отсутствии такой модели наиболее предпочтительным является использование пропорционального закона управления.
Ограничения на выбор управляющего закона приводят к увеличению времени переходного процесса (достаточно медленное управление). Более того, для работы сервоуправления необходимо все время держать объект в поле зрения видеокамеры, что ограничивает его скорость движения относительно робота. При исчезновении отслеживаемого объекта из поля зрения визуальный сервоконтур отключается и начинают работать эвристические методы управления
(например, поисковое движение в направлении вектора исчезновения объекта из поля зрения).
Необходимо отметить, что упомянутые ограничения менее существенны при использовании в визуальных сервоконтурах широкоугольных или даже всенаправленных камер.Для получения устойчивого управления в визуальных сервоконтурах экспериментального робота были выведены выражения для вычисления максимальных пропорциональных коэффициентов усиления серворегулятора для вектора параметров отслеживаемого объекта (задача отслеживания направ
(задача отслеживания направ
ляющей линии), соответствующего ему вектора рассогласования управляющего вектора
управляющего вектора Максимальные значения коэффициентов бы
Максимальные значения коэффициентов бы
ли получены для следующего управляющего закона
Максимальные значения коэффициентов усиления явля
явля
ются функциями эффективного фокусного расстояния камеры f, размера изображения, максимальных скоростей в приводах, диаметра колес d, колесной базы Lkoji, заданного критерия перерегулирования χи периода квантования цикла управления T. Для текущей конфигурации мобильного робота допустимые значения коэффициентов усиления определялись следующими неравенствами

Качество контуров визуального сервоуправления построенных с учетом рекомендаций по выбору коэффициентов было проверено путем проведения натурных экспериментов на прототипе мобильного робота по отслеживанию движения цветного маркера в поле зрения одной из двух видеокамер робота. На рис.4.12 показаны результаты отслеживания маркера визуальным серворегулятором с параметрами χ = 0.05 (5%) и T = 100 мс. Коэффициент K9uбыл задан больше допустимого указанного выше неравенствами предела, что привело к появлению колебаний в контуре.
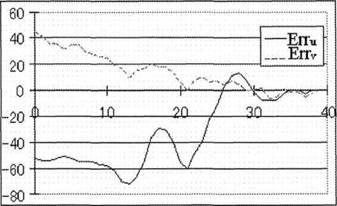
Рис.4.12. Отслеживание маркера визуальным серворегулятором.
Еще по теме Реализация навыка отслеживания с помощью программного визуального серворегулятора:
- 4.3.3. Реализация навыка отслеживания с помощью обучаемого нейросетевого визуального серворегулятора
- Программная система визуального контроля горизонтальной скорости беспилотного вертолета
- 3.2 Программная реализация
- Классификация по способу программной реализации
- Контроль с помощью программного обеспечения.
- Е. овладевать знаниями, умениями, навыками по их реализации. Исполнение экономических ролей
- 3.2.2 Минимизация ресурсных требований к программной реализации
- 3 Программная реализация системы выделения сюжетной части изображения
- 3.8.13 Отслеживание влияний, зависимостей и ошибок
- Визуальная синектика
- 7.2.4. Визуальный контакт
- Визуальное управление