Визуальное управление
Методы визуального управления часто используются в простых навигационных задачах для автономных роботов [33, 221, 279, 295, 308, 336, 359] и их 70
можно разделить на методы визуального позиционирования и методы визуального сервоуправления (рис.
1.7). В методах визуального позиционирования необходимо знать точное нелинейное преобразование между CK окружающей среды и CK плоскости изображения камеры, а также ориентацию и положение предметов в окружающей среде. Для определения коэффициентов в нелинейном преобразовании координат часто необходимо проводить процедуру калибровки, которая позволяет определить коэффициенты искажения изображения оптикой камеры, а также ее кинематические параметры.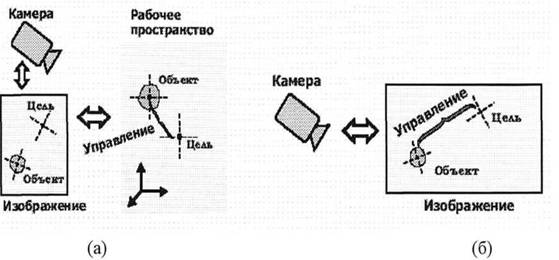
Рис. 1.7. Подходы к визуальному управлению: а - визуальное позиционирование; б - визуальное сервоуправление
Термином «сервоуправление» обозначается любая методика управления при которой регулятор стремится перевести систему в заданное состояние со скоростью, зависящей от рассогласования между заданным и текущем состоянием системы. При визуальном сервоуправлении заданное и текущее состояния вычисляются СТЗ, либо непосредственно в координатах получаемого изображения, либо после кинематических преобразований, в координатах РП [265]. Сервоуправление используется также в задачах отслеживания траекторий, сближения с объектами и следования за ними.
Визуальные методы сервоуправления не требуют процедуры калибровки, а зачастую даже не требуют знания преобразования координат между плоскостью изображения и окружающим миром. В последнем случае управляющий сигнал вычисляется непосредственно в координатном пространстве изображения, а следовательно, и навигационная цель может быть также сформулирована в терминах координат плоскости изображения. При реализации визуального сервоуправления, как правило, проводится сопоставление текущих и базовых изображений с исскуственными и естественными ориенирами (см. раздел 1.3.4).
Задача навигации может быть представлена в виде набора простых навигационных навыков, каждый из которых управляется замкнутым визуальным сервоконтуром. Простота визуального сервоуправления позволяет роботу самостоятельно обучаться навыкам управления в таких визуальных сервоконтурах в процессе его функционирования. Недостатком является то, что для визуального управления камера должна постоянно наблюдать объект в поле своего зрения.
1.5.4.
Еще по теме Визуальное управление:
- 7.2.4. Визуальный контакт
- Визуальная синектика
- Визуальная коммуникация
- Визуальная (невербальная) коммуникация
- Визуальный контроль заполнения анкет.
- Использование визуальных ориентиров в задачах локализации и навигации роботов
- Локализация робота на карте рабочего пространства с использованием визуально различимых ориентиров
- Постановка задачи визуального сервоуправления с целью точного позиционирования робота
- 4.1. Визуальный анализ траекторий движения мелющей загрузки
- Реализация навыка отслеживания с помощью программного визуального серворегулятора
- 4.3.3. Реализация навыка отслеживания с помощью обучаемого нейросетевого визуального серворегулятора
- 8.6. Визуальная психодиагностикакриминальных признаков личности
- Интерпретация полученных визуальных данных
- Релаксационный вероятностный метод сопоставления визуальных ориентиров на двух изображениях
- Описание натурной модели смесителя для визуального анализа характера движения компонентов смеси
- Завершение вербальных или визуальных комплексов.
- Визуальные/письменные методыИздание внутрикорпоративного журнала
- 6.6. Использование визуальных и слуховых маркеров ориентировки
- Позиционирование робота относительно визуальных ориентиров