Локализация робота на карте рабочего пространства с использованием визуально различимых ориентиров
При локализации мобильных роботов с использованием визуально различимых ориентиров подразумевается, что карта рабочего пространства и расположение ориентиров на ней известны заранее.
Локализация мобильного робота осуществляется путем визуального обнаружения ориентиров, расположенных рядом с роботом, и сопоставления полученной информации с информацией о рабочем пространстве робота. Ориентиры распознаются и классифицируются при помощи видеокамеры и СТЗ робота. Для увеличения зоны обзора видеокамера может быть установлена на вращающейся панорамной головке. Если в СТЗ используются робастные методы распознавания визуальных ориентиров, а в методах локализации используются консервативные условные сенсорные модели, то это позволяет минимизировать нарушения Марковских постулатов в динамически изменяющихся рабочих пространствах. Консервативная сенсорная модель должна учитывать тот факт, что часть ориентиров, которые могут наблюдаться из некоторого местоположения, может быть загорожена движущимися объектами (например, людьми), поэтому в действительности робот может наблюдать лишь часть ориентиров потенциально видимых из данного местоположения.Для эффективной локализации с использованием визуальных ориентиров в рабочем пространстве робота должно находиться достаточное их количество (рис.6.1), а сами ориентиры должны отличаться друг от друга (в некоторых ме-
тодах локализации с использованием триангуляции предполагается, что все ориентиры должны быть уникальными [206]). Однако, на практике, при большом количестве ориентиров очень сложно обеспечить большое разнообразие их типов, а тем более их уникальность. Для этого необходимо, чтобы любой из ориентиров был бы визуально достаточно непохож на остальные, и чтобы этоМы предполагаем, что робот не способен индивидуально классифицировать обнаруживаемые им визуальные ориентиры, а способен классифицировать только тип каждого наблюдаемого ориентира.
Ориентиры одного типа являются неотличимыми друг от друга для робота. В то же время, робот имеет возможность надежно различать типы обнаруживаемых ориентиров на основе общих свойств ориентиров данного типа. Это предположение позволяет разместить в рабочем пространстве большое количество ориентиров без необходимости индивидуальной идентификации каждого из них.могли обнаружить методы обработки изображений.

Рис.6.1. Карта рабочего пространства робота с расположенными на ней ориентирами различного типа
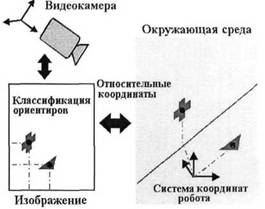
Рис. 6.2. Обнаружение роботом ориентиров, их классификация и вычисление относительных координат
Постановка задачи локализации
Задача локализации решается путем визуального обнаружения и распознавания ориентиров в рабочем пространстве робота, определения их характеристик и сопоставления полученной информацией с заранее заданной информацией о рабочем пространстве для нахождения текущего местоположения робота. Обозначим отдельный ориентир как

279
где L - множество всех ориентиров, имеющихся в рабочем пространстве. Общее количество ориентиров (размер множества L)равно Nl. Таким образом, рабочее пространство содержит фиксированное количество визуальных ориентиров.
Каждый из ориентиров может быть отнесен к одному из нескольких общих типов ориентиров. Будем считать, что все ориентиры одного типа образуют некоторый класс ориентиров. Запишем это в следующем виде

где Lkподмножество ориентиров определенного класса к и Nkколичество ориентиров данного класса. Полное множество ориентиров образуется как L = {Li, ,Ln}, где Nt- количество классов ориентиров.
Мы предполагаем, чтоодин ориентир может принадлежать только определенному классу ориентиров, поэтому для полного множества ориентиров выполняются следующие условия

где символ U обозначает объединение множеств, символ пересечение множеств, а О обозначает нулевое множество. Таким образом, каждый ориентир Iiхарактеризуется своим местоположением на карте
пересечение множеств, а О обозначает нулевое множество. Таким образом, каждый ориентир Iiхарактеризуется своим местоположением на карте и своим
и своим
классом Lk. То есть для каждого ориентира мы имеем..................................... Внутри од

ного класса все ориентиры считаются неотличимыми друг от друга.
Когда робот обнаруживает ориентир он определяет его принадлежность к некоторому классу Lmи вычисляет его координаты
он определяет его принадлежность к некоторому классу Lmи вычисляет его координаты в
в
своей системе координат. На рис. 6.2 показан процесс локализации робота с использованием ориентиров.
Процесс функционирования мобильного робота с точки зрения задачи локализации можно формально разбить на серию однотипных шагов. На каждом t - м шаге своего функционирования робот измененяет свое местоположение (выполняет перемещение, обозначаемое at)и обнаруживает с помощью системы технического зрения визуальные ориентиры в окружающем пространстве, помещая их в множество - некоторый обнаруженный ориентир и
- некоторый обнаруженный ориентир и - число обнаруженных ориентиров (размер мно
- число обнаруженных ориентиров (размер мно
жества
Задача локализации состоит в том, чтобы вычислить текущее местоположе-

6.2.
Еще по теме Локализация робота на карте рабочего пространства с использованием визуально различимых ориентиров:
- Использование визуальных ориентиров в задачах локализации и навигации роботов
- Вероятностный метод Марковской локализации с использованием визуальных ориентиров
- Позиционирование робота относительно визуальных ориентиров
- 6.3. Повышение эффективности метода Марковской локализации с визуальными ориентирами
- Релаксационный вероятностный метод сопоставления визуальных ориентиров на двух изображениях
- Общий подход к решению задачи корректного сопоставления визуальных ориентиров на текущем и базовом изображениях
- Постановка задачи визуального сервоуправления с целью точного позиционирования робота
- Позиционирование объектов относительно робота по информации с визуальных сенсоров .
- Задачи локализации и точного позиционирования мобильных роботов
- Пример использования метода Марковской локализации
- 3.2. Локализация в пространстве
- Использование выборочных вычислений для повышения эффективности Марковской локализации
- Эксперимент по точному позиционированию MP с использованием визуального сервоуправления.
- 6.6. Использование визуальных и слуховых маркеров ориентировки
- Анализ использования фонда рабочего времени
- Увеличение неопределенности местоположения робота при использовании вероятностной модели движения
- Анализ использования рабочего времени