Эксперимент по точному позиционированию MP с использованием визуального сервоуправления.
Эффективность предложенного метода точного позиционирования MP были подтверждены серией численных экспериментов. MP имеет возможность перемещаться по двум координатным осям X, Yи изменять угловое положение l9 (рис.5.1).
Видеосистема MP моделировалась виртуальной моделью камеры с точечной апертурой, жестко связанной с мобильной платформой и направленной на 30 градусов ниже уровня горизонта. Погрешности измерения координат ориентиров на изображении моделировались путем добавления к координатам ориентиров в плоскости изображения камеры нормально распределенной величины с нулевым математическим ожиданием и σ= 0.8 пикселей. Базовое изображение было получено в момент нахождения MP в точке позиционирования и включало 5 точечных ориентиров, расположенных в рабочем пространстве в одной (вертикальной) плоскости. После получения базового изображения MP вычислял в конечных разностях якобиан J7, совершая последовательную серию малых перемещений ∆x = ∆y = 0.1 м и
Была проведена серия численных экспериментов управления перемещением MP в точку позиционирования из произвольных точек окрестности C линейной ∣∆x∣, ∣∆y∣< 1 м и угловой начальной погрешностью.
начальной погрешностью.
Расстояние от точки позиционирования до сцены (боковой стены) по элементам базового и текущего изображения которой ориентировался MP составляло 2,8 м.
На рис. 5.16,а приведены несколько траекторий (1-4) движения MP и соответствующие им графики изменения угла ориентации (рис. 5.16,6) при использовании визуального сервоуправления для точного выведения робота в
точку позиционирования.
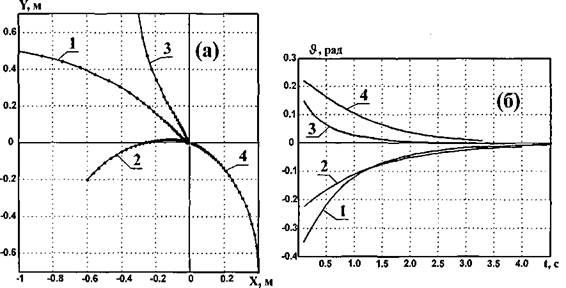
Рис. 5.16. Траектории движения (а) и изменение ориентации (б) при визуальном сервоуправлении MP
В серии выполненных экспериментов средняя погрешность позиционирования робота составила 22 мм по положению и 1,4 градуса по ориентации.
При увеличении погрешности измерения координат ориентиров на изображении погрешность позиционирования возрастала. Это показало, что визуальное сервоуправление может эффективно применяться для точного позиционирования MP без использования какой-либо информации о координатах MP. Преимуществом данного метода является то, что при его использовании не требуется никакой информации о местоположении робота. Это позволяет использовать этот метод для точного позиционирования мобильного робота в отсутствии точной карты рабочего пространства, а также для точной привязки автономной системы локализации робота (устранения накопленной ей погрешности) относительно реперных точек в рабочем пространстве.
1.6.
Еще по теме Эксперимент по точному позиционированию MP с использованием визуального сервоуправления.:
- Постановка задачи визуального сервоуправления с целью точного позиционирования робота
- Использование систем технического зрения для визуального сервоуправления в простых навигационных задачах
- Позиционирование робота относительно визуальных ориентиров
- Позиционирование объектов относительно робота по информации с визуальных сенсоров .
- Использование визуальных ориентиров в задачах локализации и навигации роботов
- Локализация робота на карте рабочего пространства с использованием визуально различимых ориентиров
- 6.6. Использование визуальных и слуховых маркеров ориентировки
- Вероятностный метод Марковской локализации с использованием визуальных ориентиров
- Использование систем технического зрения для позиционирования объектов относительно робота в локальных навигационных задачах
- 4.2. Использование методики полного факторного эксперимента при проведении исследования влияния СОЖ на процесс резания
- Реальный эксперимент. Виды экспериментов по цели, уровню исследования, типа экспериментальной ситуации и др.
- Эксперимент. Сущность и определение. Главные особенности психологического эксперимента.
- Стратегии эксперимента. Основные формы констатирующего эксперимента.
- Визуальное управление
- 2.3. Школа позиционирования