Использование выборочных вычислений для повышения эффективности Марковской локализации
В данном разделе представлен избирательный метод, повышающий эффективность алгоритма Марковской локализации, использующего дискретные вероятностные сетки для дискретного представления функции плотности распределения для возможных местоположений робота в пространстве состояний [112,307].
Предлагаемый метод использует визуальные ориентиры, которые обнаруживаются установленной на роботе видеокамерой и системой технического зрения.Запишем основные выражения метода Марковской локализации (6.5) и (6.7) в компактном виде. Для каждого перемещения на t-м шаге для функции плотности распределения вычисляется прогноз в следующем виде
вычисляется прогноз в следующем виде  где
где —функция плотности условной вероятности для перемещения
—функция плотности условной вероятности для перемещения
at, которое изменило местоположение робота с предыдущего состояния на ξz. При вычислении выражения (6.14) берутся в расчет все возможные предыдущие местоположения
на ξz. При вычислении выражения (6.14) берутся в расчет все возможные предыдущие местоположения т.е. все состояния с вероятностью выше нуля.
т.е. все состояния с вероятностью выше нуля.
. В случае обнаружения множества визуальных ориентиров функция P(ξ) согласуется (уточняется) с данными наблюдений с использованием следующего выражения
функция P(ξ) согласуется (уточняется) с данными наблюдений с использованием следующего выражения
где -функция плотности условной вероятности для наблюдения обна
-функция плотности условной вероятности для наблюдения обна
руженного множества ориентиров из состояния ξ (иногда называемая сенсорной моделью)’,
из состояния ξ (иногда называемая сенсорной моделью)’, - предыдущая (априорная) плотность распределения
- предыдущая (априорная) плотность распределения - нормирующий множитель.
- нормирующий множитель.
Традиционными методами повышения вычислительной эффективности Марковской локализации являются методы выборочных вычислений. Наиболее прямолинейный и самый часто используемый способ — установка минимального порогового значения априорной вероятности, при превышении которого состояние будет обновляться в выражениях (6.14) и (6.15). Если значение априорной вероятности для состояния меньше заданного порогового значения, то это состояние игнорируется при вычислениях. При этом апостериорная вероят
ность в этом состоянии предполагается нулевой. Такой подход позволяет сократить вычислительные затраты, но при этом имеет ряд недостатков.
Первый недостаток заключается в том, что в любом случае при каждой итерации тратятся незначительные вычислительные ресурсы на проверку значения вероятности в каждом состоянии в дискретной сетке. Второй, более важный недостаток, состоит в том, что игнорирование состояний с малой априорной вероятностью обычно ухудшает способность метода локализации восстанавливаться после ошибок. При ошибочных сенсорных данных на шаге согласования функции с этими данными, метод локализации может переключиться на задачу глобальной локализации, решение которой требует много времени (в течение которого робот не может нормально функционировать). Проигнорированные пороговым условием состояния с низкой априорной вероятностью могут соответствовать действительному местоположению, поэтому их учет способствует более быстрому восстановлению корректного местоположения после ошибок. В данной работе такой случай проиллюстрирован в численном эксперименте по решению задачи о «похищении» робота.
с этими данными, метод локализации может переключиться на задачу глобальной локализации, решение которой требует много времени (в течение которого робот не может нормально функционировать). Проигнорированные пороговым условием состояния с низкой априорной вероятностью могут соответствовать действительному местоположению, поэтому их учет способствует более быстрому восстановлению корректного местоположения после ошибок. В данной работе такой случай проиллюстрирован в численном эксперименте по решению задачи о «похищении» робота.
Для наиболее эффективного обновления функции плотности вероятности для местоположения робота на итерациях Марковского алгоритма наш метод использует информацию о визуальных ориентирах, обнаруженных на текущем шаге алгоритма локализации. В нашем методе для организации выборочных вычислений мы используем геометрические ограничения, которые явно определяют области в пространстве состояний, где следует обновлять значения функции плотности вероятности в выражениях (6.14) и (6.15).
в выражениях (6.14) и (6.15).
Функция плотности вероятности обновляется на текущем шаге согласования и последующем шаге прогнозирования только в тех дискретных состояниях, которые находятся внутри, по крайней мере, одной области обновления. Это позволяет значительно снизить вычислительные затраты при реализации метода. Приме
обновляется на текущем шаге согласования и последующем шаге прогнозирования только в тех дискретных состояниях, которые находятся внутри, по крайней мере, одной области обновления. Это позволяет значительно снизить вычислительные затраты при реализации метода. Приме
ры двумерных проекций областей обновления для одного (а), двух (б) и нескольких (в) обнаруженных ориентиров показаны на рис. 6.7 (в действительности области обновления заданы в трех измерениях). Предложенный подход, в некотором роде, похож на метод, описанный в [375], который задает местоположения робота в системе координат, связанных с ориентирами для отслеживания нескольких гипотез местоположения на основе метода локализации Монте-Карло.
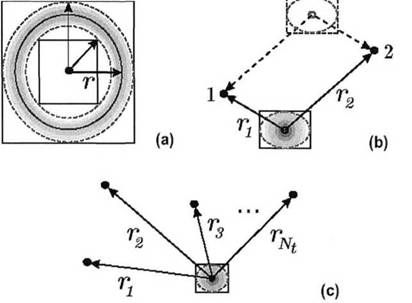
Рис. 6.7. Примеры областей обновления (двумерные проекции)
Методики оценки местоположения робота по одному, двум, трем и более визуальным ориентирам рассмотрены в разделе 4.2.4 данной работы. Указанные методики используются в данной главе для вычисления местоположения областей обновления на карте.
При локализации MP с использованием визуальных ориентиров рабочее пространство содержит множество визуальных ориентиров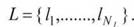
Каждый ориентир Iiво множестве Lможет быть отнесен к одному из классов ориентиров li∈ Lk.
Подмножества Lkобразуют множество Lи не пересекаются (выполняются условия (6.1) и (6.2)). Это означает, что отдельный ориентир может принадлежать только одному классу ориентиров. Каждый ориентир Zz характеризуется: а) своим местоположением в рабочем пространстве _ t jб) своим классом Lk. В процессе функционирования мобильный робот обнаруживает ориентиры при помощи видеокамеры и системы технического зрения, которая распознает и классифицирует ориентиры. Ориентиры, обнаруженные на текущем шаге функционирования, составляют множество
jб) своим классом Lk. В процессе функционирования мобильный робот обнаруживает ориентиры при помощи видеокамеры и системы технического зрения, которая распознает и классифицирует ориентиры. Ориентиры, обнаруженные на текущем шаге функционирования, составляют множество

На практике показания сенсоров робота и карта окружающего пространства содержат ошибки и неточности, которые следует учитывать, и которые мы принимаем во внимание в нашем методе визуальной локализации. Мы предполагаем, что эти ошибки распределены по нормальному закону. Местоположение ~ - 2 ориентира р на карте задано с точностью, выражаемой дисперсией σ7и соответствующей ковариационной матрицей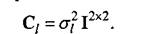
Относительные координаты обнаруженного ориентира вычисляются с точностью, выраженной ковариационной матрицей
обнаруженного ориентира вычисляются с точностью, выраженной ковариационной матрицей  где σrи στстандартные погрешности в измерении расстояния и азимута ориентира. Ошибка в вычислениях может быть следствием погрешностями обработки и шума в видеосистеме, помех в окружающем пространстве и геометрическими искажениями в изображении обнаруженных ориентиров. Данная ошибка обычно моделируется на основании анализа статистических данных, полученных от видеосистемы. Здесь мы предполагаем, что погрешность оценки дистанции σ, линейно зависит от г (при удалении от робота в то же количество пикселей изображений проецируются объекты разного размера). Погрешность определения угла азимута σrпредполагается постоянной (в зависимости от характеристик камеры на один пиксель изображения приходится примерно один и тот же угловой размер).
где σrи στстандартные погрешности в измерении расстояния и азимута ориентира. Ошибка в вычислениях может быть следствием погрешностями обработки и шума в видеосистеме, помех в окружающем пространстве и геометрическими искажениями в изображении обнаруженных ориентиров. Данная ошибка обычно моделируется на основании анализа статистических данных, полученных от видеосистемы. Здесь мы предполагаем, что погрешность оценки дистанции σ, линейно зависит от г (при удалении от робота в то же количество пикселей изображений проецируются объекты разного размера). Погрешность определения угла азимута σrпредполагается постоянной (в зависимости от характеристик камеры на один пиксель изображения приходится примерно один и тот же угловой размер).
6.3.2.
Еще по теме Использование выборочных вычислений для повышения эффективности Марковской локализации:
- Алгоритм Марковской локализации с выборочными вычислениями
- 6.3. Повышение эффективности метода Марковской локализации с визуальными ориентирами
- Пример использования метода Марковской локализации
- Вероятностный метод Марковской локализации с использованием визуальных ориентиров
- Стадник Алексей Викторович. Использование искусственных нейронных сетей и вейвлет-анализа для повышения эффективности в задачах распознавания и классификации, 2004
- Организация выборочных вычислений
- - 2003. - N 1. - ст. 133. Постановление Правительства РФ от 10 апреля 2002 г. N 228 "О мерах по повышению эффективности использования
- 37 и 38. Создание команд для повышения эффективности деятельности организации
- 4. Использование В. И. Ульяновым юридических знаний для повышения политической активности рабочих
- Целью диссертационной работы является совершенствование механизмов управления развитием комплексов предприятий автомобилестроения для повышения эффективности их деятельности
- Использование визуальных ориентиров в задачах локализации и навигации роботов
- Л.А. Сипко, Г.М. Ефремова. МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ по организации и повышению эффективности экономического участия пайщиков, а также кооперативным выплатам (Электронный вариант для дистанционного обучения). Новосибирск –2001, 2001
- Локализация робота на карте рабочего пространства с использованием визуально различимых ориентиров
- 2.4. Моделирование работы подвижного состава с использованием марковских случайных процессов
- Глава 2Моделирование экономических систем с использованием марковских случайных процессов
- Предложения по повышению эффективности ГЭЭ.
- 75. Собственников предприятия, акционеров, поставщиков, покупателей, кредиторов, налоговые органы интересует информация об изменении доли собственного капитала, о доходах, об эффективности инвестиций и эффективности использования ресурсов и др.
- 3.2 Повышение эффективности структуры управления и кадрового обеспечения