§ 3. Институт — кибернетическая система
Размытость субъекта и механизмов управления в большинстве институтов, «мягкость» их структуры, количественная неопределенность реализуемых институций говорят об их слабой управляемости в традиционном понимании, то есть применительно к технологическим процессам и малым группам.
Однако одна из главных задач управления — поиск оптимальных состояний — имеет самостоятельное значение, выходящее за рамки собственно институционального менеджмента. Оптимальные состояния могут выступать как конечные (эквифинальные) состо-яния различных процессов (гомеостазиса, самоорганизации, развития) , изучаемых на следующих уровнях моделирования.
Любая цель управления может формулироваться как задача оптимизации, поэтому определим частную задачу управления институтом как поиск оптимальной (для некоторого заданного на ней функционала) иерархической структуры. Эта задача до последнего времени находилась вне сферы внимания классических «оптимизационных» направлений математики и ее экономических импликаций. До сих пор не только не разработаны эффективные методы решения подобных задач, но и отсутствует их постановка даже в общем виде. Не разработана и проблема критериев институциональной оптимальности.
При наличии только функционала состояния оптимизационную задачу можно назвать статической. Однако поскольку оптимальная структура неявным образом зависит и от изменчивых внешних условий, актуальной является задача динамической оптимизации. В этом случае кроме эффективности функционирования структуры необходимо учитывать и затраты на ее возможные перестроения. В частности, динамическая оптимизация связана с проблемой выбора оптимального числа уровней иерархии в зависимости от внешних условий, которая обсуждается в мате-матической литературе лишь на качественном уровне.
Изложим кратко подход к решению поставленной задачи и некоторые результаты моделирования (подробнее см.
: Воронин, Мишин, 2003) . Сформулируем задачу оптимизации иерархической структуры (конечного ориентированного ациклического графа) : найти ЗГЕ min P( G) , где W — множество допустимых иерархических структур (иерархий) с заданным на нем функционалом P: W® [0;+?), который будем называть функционалом стоимости. Как отмечалось выше, свойства заданных на структуре функционалов (целевых функций) зависят от содержательных интерпретаций, возникающих на следующих уровнях описания, однако математический подход требует выделения их самых общих свойств. Постулируемые далее свойства функционала содержательно связаны с однородностью институциональной структуры и обычно выполняются в периоды ее стабильности. Далее будем предполагать, что функционалы аддитивны (представимы в виде суммы стоимостей отдельных звеньев графа) и просты(стоимости структурно эквивалентных графов — одинаковых с точностью до переименования не начальных вершин — равны) .
Рассмотрим граф организации, под которой будем понимать воплощенный в реальной структуре любого типа, описываемой, например, графом триад или базовыми графами, над множеством элементов N (элементарных функций, исполнителей) , в котором на нижнем уровне находятся элементы из N, подчиняющиеся вершинам последующих уровней, причем каждая главная вершина однозначно характеризуется группой (множеством) подчиненных ей элементов.
Введем понятие графа организации заданного набора f = { fj,..., fm} групп элементов ft с N, то есть графа, который содержит все группы набора. Множество таких графов организации обозначим через 0(f) . Решением задачи на 0(f) будет оптимальный среди графов организации, которые организуют группы элементов из f.
Для r > 2 r-организацией назовем такую социальную структуру, в графе которой каждое звено имеет не более r ребер. Последовательной организацией назовем 2-организацию, в которой одно из ребер каждого звена связано с листом. Организацией без пересечений назовем организацию, в которой любой вершине непосредственно подчинены вершины, координирующие и субординирующие непересекающиеся группы.
Через 0r (f) , 0p (f), O(f) , Or(f) соответственно обозначим множество ^-организаций, последовательных организаций, организаций без пересечений, r-организаций без пересечений, которые входят в 0(f), то есть организуют группы из набора f.Если набор f = { f} состоит из одной группы, то O(f) будет множеством деревьев организации одной группы f. Через D( f) = O( f) и Dr ( f) = Or ( f) соответственно обозначим множество деревьев и r-деревьев из 0(f) . Веерной (двухуровневой!) организацией (простой структурой) назовем организацию, в которой каждая группа организуется непосредственно из составляющих ее элементов. Примеры видов организации приведены ниже на рис. 2.
Решение задачи на объединении множеств 0(f), 0r (f), 0p (f), O(f) , Or (f) для различных наборов f получается после решения
задачи на каждом из множеств по отдельности. С помощью таких объединений можно представить достаточно широкий класс множеств графов организации.
Структурный функционал на множестве организаций представим в виде P( G) = VXNqP( Sn ¦¦¦ > gt) , где G = (V, E) —организация, Ng — множество листьев или начальных вершин (элементов) , g , . ., дк — подгруппы, непосредственно организуемые вершиной (группой) g2. Величина P (g , .., дк) > 0 определяет стоимость звена, организующего набор групп g1, . ., д . Структурный функционал полностью определен, если величина P (g1,.., д ) задана на всевозможных наборах групп.
Функционал назовем монотонным, если его значение не убывает при расширении одной из подгрупп и при добавлении новой подгруппы. Функционал назовем выпуклым, если при k > 3 вместо организации подгрупп g1, . .., д в группу g = gx U... U gk можно, не увеличивая стоимость, сначала организовать некоторые подгруппы из g1,.., д , а затем полученную группу организовать с оставшимися подгруппами из g , .., д . Назовем функционал вогнутым, если уменьшить стоимость таким образом нельзя. Выпуклый функционал назовем существенно выпуклым, если при организации двух неначальных подгрупп можно из одной удалить произвольный элемент, а затем организовать его с полученной группой, не увеличивая стоимости.
Справедливы следующие теоремы:Теорема 1. При монотонном функционале для любой организации G є O( f) одной группы f существует дерево Dє D( f) не большей стоимости: P(D) < P(G) .
Теорема 2. При выпуклом функционале для любой организации Gє O(f) набора групп f существует 2-организация G2 є O2(f) не большей стоимости: P(G2) < P(G).
Теорема 3. При монотонном вогнутом функционале веерная организация одной группы f оптимальна на 0(f).
Теорема 4. При существенно выпуклом функционале для любой организации G є O(f) набора групп f существует последо-
вательная организация Gp є Op(f) не большей стоимости:
P(Gp) < P(G).
Из этих теорем можно сделать следующие основные выводы об организации произвольного числа групп: а) при выпуклом функционале 2-организация минимальной стоимости будет оптимальной (решения на 02 (f) и O2(f) будут оптимальны соответственно на 0r (f) , 0(f) и Or(f) , O(f) ); б) при существенно выпуклом функционале последовательная организация минимальной стоимости будет оптимальной (решение на 0p (f) будет оптимально и на 0(f), 0ґ (f), 0(f) , 0Г(f) ) .
По поводу организации простого института из данных теорем можно сделать следующие основные выводы: а) при монотонном функционале дерево минимальной стоимости также будет и оптимальной организацией (решения на D(f) и D (f) будут оптимальны соответственно на 0(f) и 0 (f)); б) при монотонном выпуклом функционале 2-дерево минимальной стоимости также будет и оптимальной организацией (решение на D (f) будет оптимально и на D (f), D(f), 0(f), 0(f)); в) при монотонном вогнутом функционале веерная организация такого института оптимальна на 0(f), O(f) .
В качестве примера рассмотрим задачу об оптимальной организации функционального взаимодействия, заданного с помощью неиерархического (сетевого) графа. Между вершинами графа (элементарными функциями) идет обмен материалами, информацией, и т. п., что описывается ребрами графа и соответствующими им векторами мощности потоков. Для организации взаимодействия необходимо создание управляющих центров, координирующих потоки между элементами некоторых групп.
Управляющие центры следующего уровня координируют потоки между подчиненными группами и т. д. Затраты на управляющий центр описываются функцией затрат K( •) от суммарной мощности координируемых потоков. В результате получим задачу об оптимальном на D(f) дереве организации со структурным функционалом стоимости P, где f = N = {aj,...,an} — множество (группа) элементов технологического графа.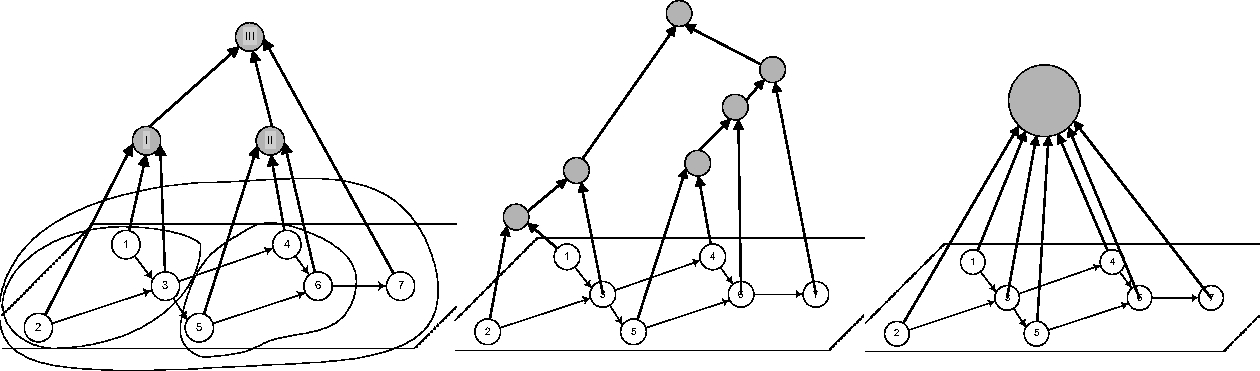
Рис. 2.
Примеры моделей организации функциональных связей в иерархии
На рис. 2 приведены различные примеры надстройки организационного графа институтов над функциональным. В центре приведен пример 2-организации, справа изображена веерная организация. В случае выпуклой функции затрат оптимальна 2-организация, в случае вогнутой — веерная организация (соответственно, максимум и минимум управляющих центров, см. теоремы 2 и 3) .
Введем понятие анонимного функционала, зависящего не от характеристик организуемого института, а от некоторой его объективной характеристики — сложности. Введем понятия однородности (независимости от масштаба сложности) и корректности в нуле (стоимость добавления подструктуры нулевой сложности — нулевая) анонимного функционала. Исходя из эмпирического анализа различных типов коллективной деятельности рассмотрим следующие примеры однородных функционалов:
P(C(g!> C(gk)) = [С(gi) +... + C(gk)-max(C(gi),...,C(gt))]P
P (C (g!),..., C (gk)) = [С (gi) + ... + C (gk )]P CC;
P (C (g!),., C (gk), C (g)) = (C (g) / max( C (gi),..., C (gk)) -1)P (Ш); P (C (gi),..., C (gk ),C (g)) = (^i=1kC (g) - C (gt ))P
где g = gx U ... U gk — организуется из подфункций g ,..., gk;
P є (0;+?) — параметр функционала;
C(g)> 0 — некоторая функция группы — сложность — монотонная по вложению групп
( C( g) < C(h) при g с h) .
Приведем следующий пример функции сложности:(*) C(g) = (gC(a)1/а )а , где а є (0, +?) — параметр сложности, C(a) — заданные
сложности элементов a є N.
Содержательный смысл сложности — величина трансакци- онных издержек при сетевой (то есть нерегулируемой) организации «сборки» сложной институции из составляющих ее подфункций (производных, то есть более «мелких» институций) . Параметр а є (0,+?) определяет рост издержек по мере роста сложности: при a = 1 сложность звена — аддитивная, при меньшей величине — супераддитивная, при большей — субаддитивная функция сложности его элементов.
Содержательно смысл институциональной стоимости представлен затратами на иерархическую организацию «сборки» конкретных функций (институций) в процессе производства благ. Ее общая величина, получаемая суммированием по вершинам (звеньям) графа, явным образом зависит от вида последнего. Четыре приведенных выше различных вида функции стоимости звена (I) —(IV) отражают различные виды координации: первый и третий отвечают затратам на управление группой с нейтраль - ным и конструктивным лидером, второй отвечает управлению группой без лидера, а четвертый — повторяющейся индивиду-альной работе с каждым элементом звена. Параметр р є (0;+? отражает «индивидуальные» особенности конкретной организации, ее принципалов и агентов. Увеличение его значений отражает рост стоимости организации.
Теоремы 1—4 позволяют исследовать свойства монотонности, выпуклости, вогнутости, существенной выпуклости функционалов (I)—(IV) и вид оптимальной для каждого из них организации. На рис. 3—6 полученные результаты для функционалов (I) — (IV) с функцией сложности вида (*) схематично представлены в виде карт параметров (некоторые результаты остаются справедливыми для любой функции сложности). По горизонтальной оси отложено значение a, по вертикальной — значение b.
Рис. 3. Оптимальные организации для функционала (I)
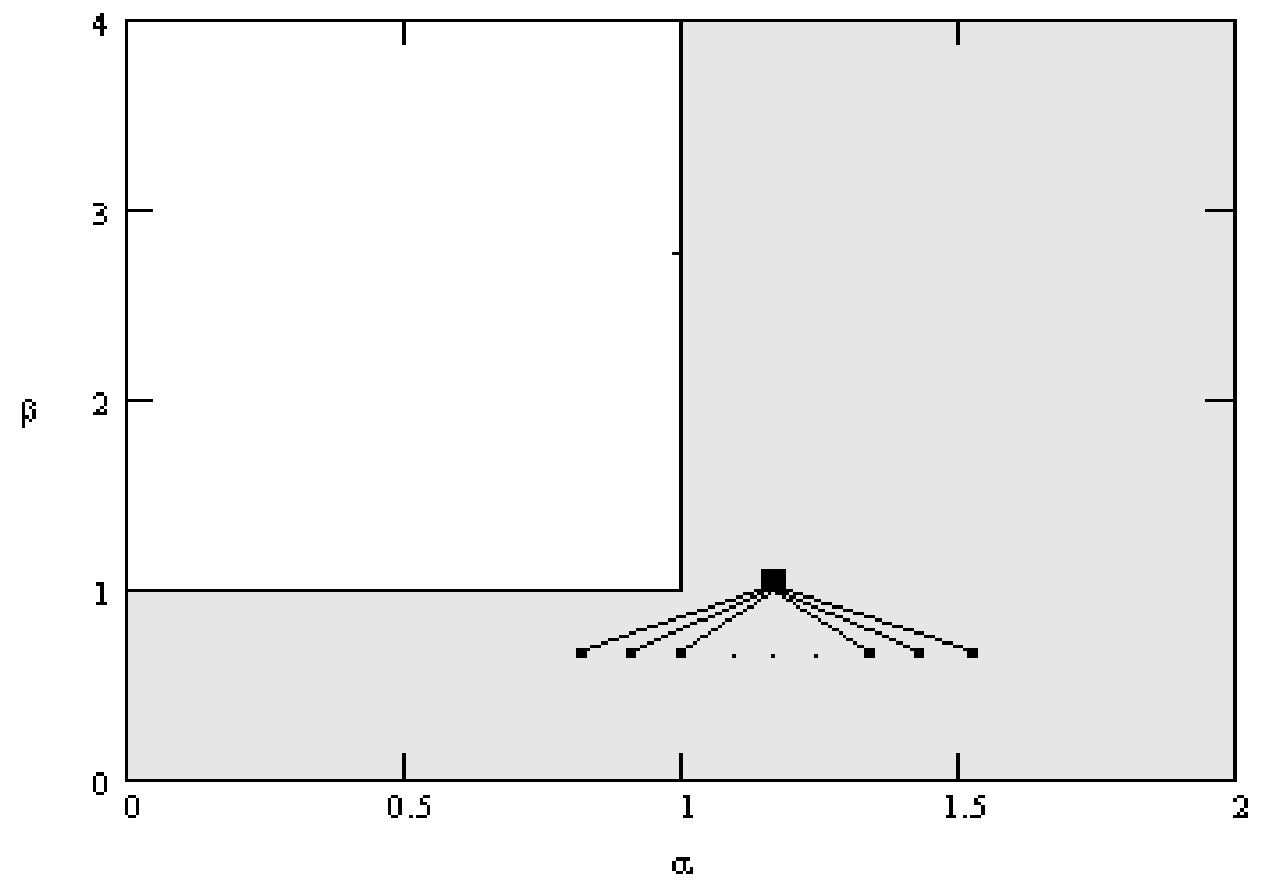
Рис. 4.
Оптимальная организация для функционала (II)
т 1 > :>if. і 1 1 t О 0.5 1 1.J
А
Рис. 5. Оптимальная организация для функционала (III)
Рис. 6. Оптимальная организация для функционала (IV)
На рис. 3 при Р< 1 — светлая область — на O(f) оптимальна веерная организация одной группы (функционал вогнут). При b > 1 — серая область — на O(f) оптимальна 2-организация произвольного набора групп f = { fl,..., fm} (функционал выпуклый) . При b > 1, ab > 1 — темная область — результат усиливается — на O(f) оптимальна последовательная организация (функционал существенно выпуклый) . Аналогичные области выпуклости, вогнутости и существенной выпуклости приведены и на рис. 4—6. Белые области соответствуют случаям, в которых функционал не является ни выпуклым, ни вогнутым. Аналитическое решение задачи в этой области на данный момент отсутствует. Ниже на рис. 7 приведен пример использования алгоритмических методов решения, из которого можно сделать вывод, что в указанных областях оптимальная организация ведет себя довольно сложным образом. При n = 25, n = 125 и n = 625 оптимально симметричное 5-дерево, в котором каждой управляющей вершине подчинено пять элементов. На рис. 7 изображено оптимальное дерево при n = 70.
Рис. 7. Оптимальное «дерево» институциональной организации для случая n = 70
При приближении b к единице функционал «приближается» вогнутому (см. рис. 3) и становится оптимальной веерная организация. При увеличении b становится оптимальной 2-орга- низация (в рассматриваемом примере при b ^ 3) . Следовательно, численные эксперименты позволяют предположить, что для любого r можно подобрать такое b, при котором будет оптимальна симметричная ^-организация (для n = r1, то есть при соответ-ствующем количестве элементов) .
Рассмотренную выше задачу поиска структуры минимальной стоимости можно назвать задачей статической оптимизации. Изменение внешних условий существования института как кибернетической системы мотивирует актуальность постановки и решения динамической задачи о его оптимальной организации. Кратко опишем одну из возможных динамических моделей ко-личественного анализа проблемы оптимального баланса статической и динамической эффективности иерархической структуры. Новизна предлагаемого подхода состоит в строгом количественном описании процессов организационных изменений на основе развитого понятийного, аналитического и алгоритмического аппарата.
В качестве цели управления предложим минимизацию суммарных затрат на организацию функционирования системы и на ее перестроение в течение произвольно заданного интервала времени. Для корректного введения затрат на реорганизацию структуры исходя из известных величин стоимости включения и исключения каждого из функциональных элементов в группу, с помощью решения ряда задач о назначении определяется содержательно интерпретируемая метрика на множестве графов организации — стоимость реструктуризации. Взаимодействие с внешней средой описывается необходимостью организации новых и ликвидации старых функ-циональных групп.
Формально определим управление как отображение текущей структуры и известной к настоящему моменту истории изменения внешней среды в структуру следующей единицы времени. Критерием оптимальности управления выступают суммарные затраты на функционирование системы и на ее реструктуриза-
цию (в смысле заданной метрики) в течение определенного ин-тервала времени.
Аналитическое решение общей задачи управления орга-низацией института представляется крайне сложным. Однако если задано некоторое количество возможных управленческих вариантов, то их сравнение может проводиться численно. В качестве примера такого набора управлений определим так называемые 1-усечения. В них на каждом шаге определяется структура, минимизирующая затраты на функционирование (оптимальная в статике), а затем она «усекается» так, чтобы число уровней иерархии не превосходило 1. При достаточно большом 1 получаем управление, минимизирующее затраты на функционирование, при 1 = 1 — управление, минимизирующее затраты на реструктуризацию и определяющее максимально простую (веерную) структуру. Оптимальное управление позволяет выбрать число уровней иерархии, при котором затраты на функционирование (эффективность) и на реструктуризацию (устойчивость к внешним воздействиям) сбалансированы оптимальным образом, то есть минимизируют издержки управления и коррекции институциональной организации. Задача вычисления 1-усечений для всех 1 сводится к рассмотренной в предыдущих главах задаче статической оп-тимизации. Для моделирования использовался функционал (I) . Построены кривые зависимости оптимального количества уровней иерархии 1opt от интенсивности изменений внешней среды s (проявляющей себя в числе созданных новых групп в единицу времени) при различных параметрах функционала b- Результат приведен на рис. 8. При этом изображены не сами кривые, которые представляют собой ломанные в силу дискретности структуры, а их гиперболические приближения, оптимальные в смысле среднеквадратичного уклонения. По оси абсцисс отложена скорость изменения внешней среды s, по оси ординат — оптимальное количество иерархических уровней 1opt.
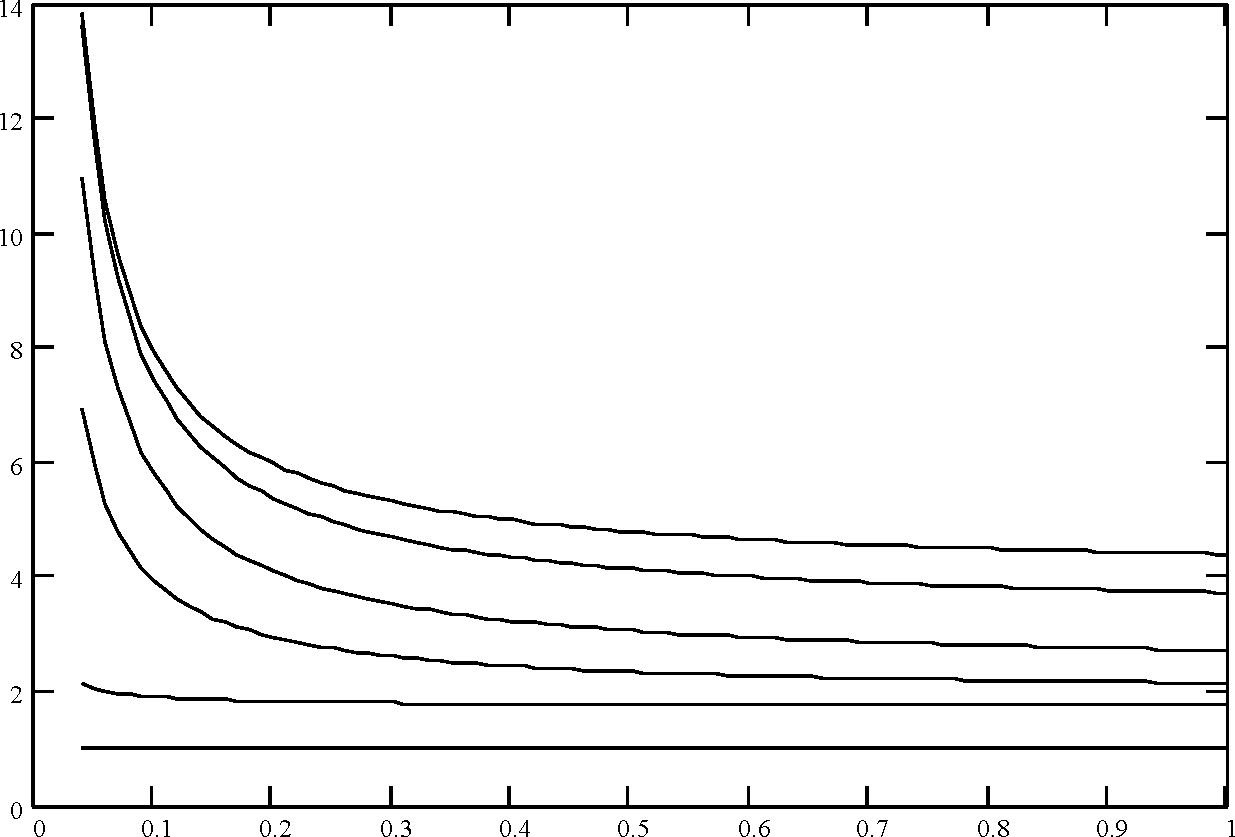
Рис. 8.
Гиперболические приближения кривых зависимости lopt от s при 0 < s = 1 и различных b = 0,25; 0,5; 0,75; 0, 95; 1; 2
На рис. 8 изображены шесть кривых при различных параметрах функционала 0,25 ? р ? 2 . Нижняя кривая соответствует значению b = 0,25, верхняя — значению b = 2 . Напомним, что при b ? 1 функционал (I) — вогнутый, при b^1 — выпуклый (см. рс. 4).
Кривые, приведенные на рис. 8, подтверждают наблюдаемую на практике закономерность: при жестких (интенсивных) внешних изменениях эффективна простая (веерная) структура институциональной организации, усложняющаяся по мере смягчения внешних воздействий (увеличивающая число уровней иерархии) . Качественно это соответствует тому, что в нестабильной внешней среде доминируют максимально простые структуры за счет высокой адаптивности 3, в стабильной же среде наоборот доминируют системы со сложной иерархической структурой, реализующей эффекты масштаба и функциональной комплекса- ции. При «ярко выраженной» вогнутости функционала (b = 0,25) большое число иерархических «узких» структур не выгодно даже при постоянной внешней среде, а выгодна единственная «широ-
кая» простая иерархия. При ослаблении вогнутости ф = 0,5) становится выгодным введение двух уровней (см. рис. 9) . При дальнейшем ослаблении вогнутости (b = 0,75) в достаточно стабильной ситуации (s<0,3) становятся выгодными более сложные структуры. Стоимость функционирования промежуточных структур уменьшается относительно общего результата при дальнейшем увеличении b (Р = 0, 95) , что при постоянной внешней среде делает выгодной последовательную организацию «наиболее узких» иерархий с максимальным количеством уровней. При b > 1 иерархия с максимальным числом уровней будет оптимальной не только при минимальных изменениях внешней среды, но и при больших к. Итак, по мере усиления выпуклости функционала затрат возрастает сопротивляемость структуры внешним изменениям, а ее упрощение (деградация) происходит при более сильных внешних изменениях.
Уровень кибернетической системы позволил не только ввести в динамическую систему (см. § 2) функционал состояния и на его основе найти особые точки и траектории, но и исследовать саму топологическую структуру фазового пространства. Действительно, введенная в § 2 топология V-пространства показы-вает многоструктурную природу динамики институтов: траектория в V/VA-пространстве, вид которой определяется динамическими свойствами ^-пространств, определяет в свою очередь смену последних. Как уже отмечалось, топология фазовых пространств, число и свойства функционалов находятся за пределами ее собственно динамической модели и требуют для своего описания введения межструктурного взаимодействия. Так, например, данное в § 2 определение элементарного преобразования применительно к конкретному институту зависит от его системы управления, допускающей структурные преобразования тех или иных подсистем. Движение по адаптивной траектории фазового пространства структуры системы управления — переход от централизованного к децентрализованному управлению — меняет топологию фазового пространства ее организационной структуры (увеличивает число ребер в соответствующем графе перестроений), а также меняет и свойства функционалов, проявляющиеся в новых правилах отбора состояний. В централизованно управляемой системе функционал состояния является агрегированной ве-
личиной, рассчитываемой каким-либо образом на всем графе. При этом реализуемое устойчивое состояние ее структуры есть один из его локальных минимумов. В децентрализовано управляемой системе тот же функционал состояния дробится на функционалы подсистем, и, таким образом, реализуемое устойчивое состояние структуры описывается состоянием равновесия некоторой игры (в теоретико-игровом смысле) в иерархической или неиерархической организационной системе. Адаптационные изменения в функциональном пространстве меняют, очевидно, значения функций состояния в пространстве организационных структур, изменения в элементном составе одной из структур (например, появление новых технологий, инструментов, методов, функций, субъектов и объектов управления и т.п.) влечет за собой изменение элементного состава, топологии, функций состояния других. Таким образом, свойства каждого типа структурного пространства зависят от состояний всех остальных типов пространств и изменение какого-либо из свойств одного из них меняет свойства остальных. Полнота системного описания требует представления ее структурной динамики в едином актуальном пространстве (A-пространстве) и представления структуры ее V-пространства как системы A-пространств с переменным составом и топологией. С этой точки зрения эмпирически известные установившиеся типы организованности соответствуют глобально устойчивым (оптимальным) состояниям в «объединенном» фазовом A-пространстве институциональной структуры. Предложенный в начале § 3 неформальный критерий сложности как основы систематизации естественным образом связывается с величиной размерностью и топологической сложностью пространства их структурной динамики.
Еще по теме § 3. Институт — кибернетическая система:
- § 7. Информация в неживой природе и кибернетических системах
- Журналистика в системе социальных институтов общества. Особенности журналистики как социального института.
- Понятие социального института, его признаки.Виды социальных институтов и их характеристики.Социальный институт как элемент общественной структуры, функции социальных институтов.Социальный институт семьи, его признаки. Этапы жизненного цикла семьи. Функции семьи. Типологии семьи. Кризисные явления в жизненном цикле семьи.
- § 2 . Институт — динамическая система
- Комплексные институты как компоненты системы российского права
- Кибернетические схемы теории воспроизводства
- "Рыночный характер" и "кибернетическая религия"
- 2. Зарождение институтов абсолютизма в системе государственного управления
- методика синтеза понятия «институт» на основе системы детерминант
- Правовая культура в системе социальных институтов
- Кибернетическая картина мира Cybernetical picture of world
- Глава 13методика синтеза понятия «институт» на основе системы детерминант
- Технологический и кибернетический аспекты понятия возвышенное Technological and cybernetical aspects of the sublime
- Формирование административно-командной системы и демократические институты страны во второй половине 20 - 30-х годах
- Раздел II СОУЧАСТИЕ КАК ИНСТИТУТ УГОЛОВНОГО ПРАВА И ИНСТИТУТ ЕГО ОБЩЕЙ ЧАСТИ
- 1.2. Понятие автономии воли сторон и его местов системе институтов международного частного права
- 3.3. Система гражданского контроля за деятельностью силовых институтов государства как условие оптимизации их взаимодействия с политической властью в современной России
- 51. Система права, отрасли и институты права. Правовые общности.
- Система права. Отрасли и институты права