Вероятностные методы локализации и навигации
Для решения задач локализации мобильных роботов при наличии неопределенности в информации о рабочем пространстве и сенсорных данных (шум, погрешности, неоднозначная интерпретация) успешно используются вероятностные методы [217, 219, 250, 343, 352, 374].
Данный класс методов позволяет получать робастные системы управления мобильными роботами с высоким уровнем автономности в силу того, что в их основе лежит учет неопределенностей присущих системе «мобильный робот - окружающая среда». Благодаря этому вероятностные методы более робастны в условиях ограниченных возможностей сенсоров, зашумленных данных, при их погрешностях, динамично меняющейся окружающей среды.При использовании вероятностных методов информация о текущем местоположении робота представлена функцией распределения плотности вероятности, которая задана во всех доступных роботу участках рабочего пространства (карте) и обновляется по итеративной методике прогнозирования и согласования с использованием формулы Байеса. В качестве «действительного» местоположения робота принимается, либо местоположение с большей степенью вероятности [217, 352], либо центр тяжести распределения [374]. Методы вероятностной локализации являются частным случаем метода оценки состояния системы в рамках теории Марковских процессов принятия решений, где искомым состоянием является местоположение MP.
C точки зрения вероятностной локализации сенсорные данные делятся на два типа. Сенсорные данные первого типа используются для привязки текущего местоположения робота к определенному месту на карте (изображение видеокамеры, показания эхолотов, сигналы лазерных дальномеров) на этапе согласования. Сенсорные данные второго типа используются для прогнозирования изменения местоположения робота во время его движения. Как правило, это сигналы управления приводами робота или показания одометрической системы.
При итеративном вычислении функции распределения плотности вероятности используется Байесовский подход к статистическому рассуждению, при котором априорное распределение вероятности «уточняется» на основе новой неполной информации, извлекаемой из текущих сенсорных данных о возможном перемещении робота или о наблюдаемом сенсорами участке РП.
Вероятностные методы локализации предполагают, что РП (представленное сенсорными данными первого типа) и передвижения робота (представленные сенсорными данными второго типа) удовлетворяют Марковским свойствам [374]:• Все показания сенсоров для данного местоположения робота предполагаются условно независимыми. Это означает что, сенсорные данные первого типа зависят только от текущего местоположения робота. Если местоположение робота известно, для предсказания текущих сенсорных данных не нужны предыдущие показания сенсоров. Это условие нарушается в динамически изменяющемся рабочем пространстве, когда, например, в поле зрения сенсоров попадают проходящие мимо люди.
• Возможные результаты всех передвижений робота условно независимы. Это означает, что на движения робота не оказывают воздействие внешние факторы. Это условие нарушается на практике, поскольку реальное передвижение робота всегда отличается от предполагаемого из-за погрешностей в системе управления, приводах и ряда факторов, зависящих от параметров окружающей среды. Минимизировать нарушение данного условия можно за счет использования консервативной модели движения робота, в которой возможные воздействия внешних факторов учтены по максимуму.
Использование вероятностных методов требует наличия (построения) двух вероятностных моделей (условных распределений плотности вероятности): сенсорной модели окружающего пространства и модели движения мобильного робота. Вероятностная сенсорная модель связывает показания сенсоров с конкретным местоположением робота. Эта модель может быть задана изначально, вычислена по данным карты или построена опытным путем при исследовании роботом неизвестной территории. Вероятностная модель движения мобильного робота связывает возможные результаты изменения местоположения робота с его программно заданным перемещением, учитывая при этом все возможные погрешности. При определении этой модели основная проблема связана с неопределенностью результатов передвижений робота, которая возникает из-за ошибок в управляющих и исполнительных подсистемах и других обстоятельств (возможное буксование колес, неровности пола, и т.д.).
Точно смоделироватьвоздействие внешних факторов невозможно или очень сложно, поэтому на практике часто используются приближенные оценки сверху [217, 372, 374]. Часто подразумевается, что величина погрешности из-за воздействия внешних факторов линейно зависит от пройденной роботом дистанции. Такой подход хорошо описывает результаты для простых перемещений (движение по прямой, вращение на месте), но для более сложных перемещений из-за нелинейности уравнений движения может давать неудовлетворительные результаты. Итеративные методы вычисления неопределенности местоположения на основе одо- метрических данных опубликованы в работах [220, 286, 353].
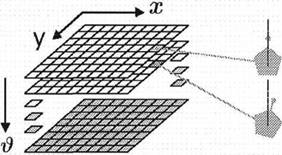
Рис. 1.9. Аппроксимация распределения вероятности с помощью трехмерных дискретных сеток
Для аппроксимации функции распределения плотности вероятности для местоположения мобильного робота хорошо зарекомендовали себя трехмерные дискретные сетки (рис. 1.9). Однако их хранение требует значительного объема памяти, особенно при увеличении площади РП и точности аппроксимации [220]. Поэтому применение дискретных сеток требует значительных вычислительных ресурсов, что делает их неэффективными и ограничивает их использование в приложениях реального времени. Для повышения эффективности Марковских методов локализации предлагают производить выборочные вычисления [220,372], динамически изменять точность получения решения за счет адаптивного изменения точности аппроксимации [218], применять эффективные модели для специфических РП [370]. Тем не менее, вычислительные затраты при таком виде аппроксимации все равно остаются высокими.
В последнее время интенсивно развивается класс вероятностных алгоритмов локализации Монте-Карло [296,373,375]. Согласно этим алгоритмам распределение плотности вероятности аппроксимируется плотностью множества взвешенных «пробных» точек, соответствующих местоположениям робота. При таком подходе снимаются ограничения на точность аппроксимации, а изменяя размер множества пробных точек можно варьировать объем вычислений.
Тем не менее, методы локализации Монте-Карло имеют ряд существенных недостатков. Во-первых, их устойчивость и эффективность сложным образом зависят от размера множества пробных точек, а также от используемых алгоритмов повторной выборки, применяемых для обновления множества пробных точек на этапах прогнозирования и согласования. Отношение между площадью окружающей среды и требуемым количеством пробных точек в методах Монте- Карло далеко не так очевидно и обычно должно быть определено в ходе экспериментов. Существует вероятность того, что метод повторной выборки может не сгенерировать пробные точки или удалить пробные точки в правильном местоположении, что приведет к тому, что робот «потеряется». Также отмечается, что методы локализации Монте-Карло медленнее восстанавливают корректное местоположение после сбоев в системе. Поэтому Марковская локализация с ап- проксимацей на дискретных сетках все еще остается одним из самых надежных и эффективных методов определения местоположения роботов.
Таким образом, актуальной проблемой мобильной робототехники является разработка методов позволяющих увеличить эффективность Марковских методов локализации за счет сокращения их вычислительных затрат.
1.6.
Еще по теме Вероятностные методы локализации и навигации:
- Вероятностный метод Марковской локализации с использованием визуальных ориентиров
- Использование визуальных ориентиров в задачах локализации и навигации роботов
- Методы реализации на основе видеоинформации простых задач навигации
- Пример использования метода Марковской локализации
- Случайные (вероятностные) методы
- Вероятностный метод сопоставления оринетиров
- Релаксационный вероятностный метод сопоставления визуальных ориентиров на двух изображениях
- Глава 1Основы вероятностных методов анализа и моделирования экономических систем
- 6.3. Повышение эффективности метода Марковской локализации с визуальными ориентирами
- 3. Основные подходы к проблеме локализации ВПФ в истории становления нейропсихологии как науки. История изучения локализации высших психических функций: узкий локализационизм, антилокализационизм, эклектическая концепция.
- Локальная и глобальная навигация.
- Научные и технические проблемы навигации роботов
- 17.5. Вероятностное мышление
- 17.5. Вероятностное мышление
- Прибрежная навигация
- Прекращение навигации
- Примитивная навигация.
- Интеллектуализация систем управления и навигации