Проблема обеспечения точности движения и позиционирования мобильных манипуляционных роботов
Общие тенденции развития MP.Обобщая результаты анализа теоретических и прикладных исследований в области мобильной робототехники можно заключить, что проектирование мобильных манипуляционных роботов, предназначенных для работы в экстремальных, опасных для человека условиях - одно из ведущих направлений развития науки и техники на современном этапе.
Можно выделить общую тенденцию развития мобильной робототехники в направлении увеличения автономности работы, точности манипулирования, движений и позиционирования роботов при учете неидеальных характеристик роботов, в условиях все более усложняющегося, не полностью определенного и изменяющегося в процессе функционирования рабочего пространства. Данная тенденция отразилась на содержании и последовательности проводимых в рамках настоящей работы исследований в части основных составляющих компонентов мобильных манипуляционных роботов (упругих манипуляторов и мобильных платформ)В существующих и эксплуатирующихся роботах зачастую отсутствует или сведено к минимуму воздействие внешней среды путем специальной организации рабочего пространства, что ведет к снижению степени автономности, про
изводительности и возможности переналадки роботов. Точность движений роботов в настоящее время обеспечивается точностью датчиков программного движения, снижением запаздывания в управляющем контуре, настройкой коэффициентов обратной связи (ОС), качеством законов управления и не в полной мере отвечает современным требованиям. В то же время, при увеличении сложности, разнообразия конструкций и выполняемых MMP операций в условиях ограниченной возможности по специальной организации рабочего пространства появляется ряд факторов, без учета которых ухудшается качество выполнения операций (точность, производительность) вплоть до невозможности их выполнения. Такими факторами являются: силовые воздействия от объектов манипулирования, упругие отклонения манипуляторов, инерционные воздействия при управляемом движении и остановке, препятствия на пути следования, зашумление сигнала, неточности или сбои датчиков ОС, несоответствие датчиков ОС разнообразным выполняемым задачам, накапливающиеся погрешности интегральных датчиков позиционирования в системе навигации мобильных платформ (мобильных роботов).
В связи с этим, дополнительно к датчикам, обеспечивающим программные движения (датчики положения, скорости манипуляторов, одометрическая система мобильных платформ), устанавливается все большее число датчиков и сенсоров различной природы, причем преимущество отдается интегральным сенсорам, сканирующим всю картину рабочего пространства. К таким сенсорам можно отнести видеокамеры, инфракрасные камеры, радиолокаторы, ультразвуковые сканеры и др. Наиболее эффективными и доступными в настоящее время интегральными сенсорами являются видеокамеры (видеосенсоры), дающие качественное изображение РП. Для обработки сигналов видеосенсоров необходимо решить ряд усложняющихся задач обработки изображений (в т.ч. и в реальном времени) для выделения из всего массива информации полезной ее части с целью повышения точности движений и позиционирования MMP в указанных выше неблагоприятных условиях.
Использование все более сложной системы датчиков, интегральных сенсоров и сканеров увеличивает сложность обработки сенсорной информации и выделения полезного сигнала, что приводит к необходимости использования интеллектуальных подходов при обработке сигналов ОС и управлении движением роботов. Общим требованием при обработке сигналов ОС является работа алгоритмов в реальном масштабе времени, что накладывает жесткие ограничения на быстродействие реализуемых методов и алгоритмов и требует повышения
вычислительной мощности бортового компьютера (что не всегда возможно по весовым и энергетическим ограничениям).
Одной из главных проблем управления движением является проблема определения точного местоположения рабочего органа (PO) манипулятора и/или мобильной платформы MP в различных абсолютных или относительных системах координат: глобальной (СК карты), локальной CK связанной с MP, относительно ориентиров или заданной цели. При этом возможно использование двух подходов:
• уточнение текущей управляемой координаты за счет математического моделирования управляемого движения с учетом неидеальностей системы «объект управления - рабочая среда» (упругости, нелинейности и переменности характеристик, неопределенности параметров рабочей среды);
• непосредственное определение действительной управляемой координаты в заданной абсолютной или относительной системе координат при помощи дополнительных сенсоров.
При управлении рабочим органом манипулятора непосредственное измерение или вычисление действительного его местоположения представляет собой сложную или невыполнимую задачу. Используемая некоторыми исследователями тензометрическая схема измерения упругих деформаций звеньев манипулятора очень сложна и недостоверна при изменении длины звеньев. В этом случае целесообразно использовать первый подход, а именно методы численного моделирования, основанные на адекватных математических моделях, которые позволят исследовать статические и динамические характеристики манипулятора в различных режимах работы. Это в полной мере относиться к проблеме обеспечения статической и динамической точности движений и позиционирования упругих манипуляторов MMP. Побочным эффектом наличия адекватной математической модели УМ является возможность решения целого комплекса задач проектирования и оптимизации параметров роботов.
Для описания точного движения мобильной платформы MMP (мобильного робота) необходимо использовать сложные неголономные дифференциальные уравнения, большое число параметров которых трудно определимы или неизвестны (в основном из-за неопределенности параметров рабочей среды). В данном случае для определения точного местоположения и ориентации робота наиболее рациональным будет второй подход, предполагающий непосредственное измерение действительной управляемой координаты робота с использованием дополнительной сенсорной системы, которая может быть построена на базе видеосистемы - видеокамеры и системы технического зрения, информация
с которых может считываться либо по запросу, либо в режиме реального времени. Поскольку видеосистемы являются интегральными сенсорами, то получаемые ими изображения, а также методы и алгоритмы их обработки могут быть использованы или модифицированы для ряда специальных (в частности, контрольно-диагностических) задач мобильной робототехники.
Рассмотрим и сформулируем более подробно взаимосвязанные и последовательно усложняющиеся перспективные направления исследований мобильной робототехники в проблеме обеспечения точности движения и позиционирования MMP при увеличении степени неопределенности описания рабочего пространства и параметров роботов.
Задачи обеспечения точности движения и позиционирования упругих манипуляторов MMP с использованием математического и численного моделирования
1. Одной из перспективных областей использования MMP является работа в экстремальных ситуациях и средах: саперные, пожарные и строительные работы, монтажные работы в космосе и под водой. Используемые при этом манипуляторы (расположенные на мобильной платформе) должны быть легкими, обладать большой зоной обслуживания и значительной грузоподъемностью. Поэтому манипуляторы MP выполняют со звеньями все большей относительной длины, что при разомкнутой схеме приводит к проблемам в обеспечении точности движения и позиционирования. Большие упругие перемещения PO манипулятора существенно искажают его программное движение, приводят к колебаниям в точке позиционирования, возникает возможность потери манипулятором статической устойчивости, что в результате приводит к снижению статической и динамической точности и быстродействия манипулятора. Одновременно, саперные, строительные и монтажные операции выдвигают на первый план требования высокой точности выполнения движений, позиционирования и манипулирования. Указанные требования приводят к необходимости решения задач динамики, статики, устойчивости, управления движением и позиционированием, точного измерения координат манипулятора с учетом упругости его звеньев. Кроме того, актуальны задачи обеспечения устойчивости в различных конфигурациях упругого манипулятора с грузом и при воздействии нерегулярной внешней возмущающей силы.
Одним из способов решения указанных задач является более точное адекватное моделирование управляемых движений УМ при непосредственном 81
управлении движением УМ за счет синтеза на основе моделей эффективных законов управления, компенсирующих податливость их конструкции. Значительные упругие перемещения вынуждают переходить к геометрически нелинейным моделям, учитывать взаимовлияние упругих деформаций. Положение осложняется невозможностью измерить штатными средствами (датчиками программного движения) статических и динамических ошибок на конце звеньев, на рабочем органе или схвате манипулятора, т.к.
датчики программного перемещения и скорости размещаются в начале каждого упругого звена, в зоне расположения приводов движения. Результирующая ошибка многократно увеличивается в многозвенных манипуляторах.Универсальность метода конечных элементов позволяет реализовывать на его основе эффективные модели, методы и алгоритмы расчета геометрически нелинейных систем практически любой сложности. Ранее предложенные модели стержневых конечных элементов не в полной мере учитывают некоторые особенности пространственной деформации стержней: взаимовлияние изгиба и кручения, кручения и растяжения-сжатия, нелинейность осевой силы вдоль оси стержня при его изгибе. Это, в свою очередь, не позволяет решать некоторые специфические задачи изгиба и устойчивости упругих стержневых конструкций в пространстве и приводит к получению неточных результатов при анализе стержневых систем, к которым относятся манипуляторы роботов.
Поэтому, при моделировании управляемого движения упругих манипуляторов роботов на подвижной платформе актуальной задачей является разработка адекватных конечноэлементных (распределенных) моделей УМ, позволяющих учитывать приведенные выше нелинейные факторы. Для численного анализа динамики геометрически нелинейных стержневых систем необходимо использовать итерационные методы численного интегрирования. Такие модели при предварительном расчете управляемого движения манипулятора позволят:
• решать задачи обеспечения статической точности путем компенсации приводами УМ предварительно вычисленных ошибок, возникающих из-за упругости звеньев, в точке позиционирования PO;
• исключить неустойчивые режимы работы УМ при различных конфигурациях, внешних и управляющих воздействиях, точно моделировать управляемые движения на границе устойчивости;
• разрабатывать и верифицировать адекватные приближенные модели УМ как систем с сосредоточенными упруго-инерционными характеристиками (дискретные модели), для последующей задачи точного управления движением
PO по заданной траектории.
2. Для решения задач управления упругими манипуляторами при движении по произвольной траектории необходимо учитывать требования по минимизации вычислительных затрат на моделирование, которое должно выполняться в масштабе времени близком к реальному. В этом случае наиболее предпочтительны приближенные дискретные динамические модели, позволяющие получать уравнения движения упругого манипулятора в явном виде.
Одной из актуальных задач точного и эффективного управления движением по заданной траектории является решение обратной задачи кинематики упругих манипуляторов роботов, связанной с обратной задачей динамики. Эффективный и экспериментально проверенный метод решения этой задачи для пространственных упругих манипуляторов до сих пор не разработан.
Задачи обеспечения точности движения, позиционирования и определения местоположения мобильных платформ MMP (мобильныхроботов)
Обобщая проведенный анализ работ, посвященных проблеме обеспечения точного управляемого движения и позиционирования мобильных платформ MMP (мобильных роботов) можно сделать следующие выводы. Во-первых, мобильные роботы имеют тенденцию преимущественного использования в рабочих средах в которых трудно и ненадежно (в силу недостаточной точности) использовать внешние глобальные системы позиционирования и навигации (типа GPS). К таким рабочим средам относятся помещения - основные рабочие среды сервисных, персональных и технологических MP, а также пересеченная местность и городские условия.
Во-вторых, позиционирование MP с использованием системы счисления пути (одометрической системы) на основе показаний бортовых датчиков пройденного пути и численного интегрирования дифференциальных уравнений движения робота также дает неудовлетворительные результаты. Причинами этого является накопление ошибок датчиков (несоответствие измеренного пути пройденному), погрешности рассогласования по времени (асинхронность и частота съема информации с датчиков), погрешности начальной ориентации робота, неопределенности и непостоянства параметров окружающей среды (различные величины проскальзывания и пробуксовки колес для различных поверхностей). Использование инерциальных систем позиционирования приводит к аналогичным результатам. Кроме того, инерциальные системы чувствительны к тряске, резким ускорениям и имеют высокую стоимость.
Путями решения поставленной проблемы являются:
• разработка методов автономного позиционирования MP по информации от их сенсоров;
• использование для обратной связи сигналов интегральных сенсоров сканирования рабочего пространства (например, видеокамер);
• использование глубокой обработки полученных сигналов (в том числе с использованием интеллектуальных технологий) с целью выделения полезной для управления движением информации;
• наращивание вычислительных ресурсов MP или (и) разработка эффективных численных методов и алгоритмов обработки информации в реальном времени движения.
При управлении движением мобильного робота в его рабочей среде решаются следующие задачи: обработка и синтез сенсорных данных; моделирование окружающего пространства; локализация (определение местоположения); планирование маршрута. Движение MP может управляться не только сложными алгоритмами в высокоуровневой подсистеме принятия решений, но и низкоуровневыми алгоритмами, заключающихся в наборе простых правил, активизируемых рефлекторно в ответ на определенные сенсорные сигналы (или их последовательность) или по команде более высокого уровня управления. В качестве простых навигационных навыков можно выделить: распознавание объектов и ориентиров (для определения краткосрочных целей); исключение столкновений с препятствиями; определение абсолютных (в CK карты) или относительных (в CK цели) координат робота и объектов (ориентиров); отслеживание траекторий, сближение с объектами и следование за ними.
Таким образом, для подвижных платформ мобильных манипуляционных роботов проблема обеспечения точности движения и позиционирования включает в себя следующие задачи: определение точного местоположения робота в локальной области или глобально на карте; формирование маршрута и следование по нему без отклонений; точное позиционирование MP в заданной точке.
Одной из наиболее перспективных сенсорных систем MP для вышеперечисленных задач является комбинация видеосенсоров (видеокамер) с системой технического зрения. Тогда вышеперечисленные задачи сводятся к задачам визуальной локализации и визуального сервоуправления. При использовании визуальных ориентиров для определения точного местоположения робота или цели необходимо надежное распознавание ориентиров.
Развитие MP требует минимизации времени и средств на подготовку рабочего пространства, возможность быстрого переобучения MP на выполнение раз- 84
личных движений и операций, возможности работы в условиях не полностью известных и изменяющихся характеристик рабочего пространства, а также при неполных и неточных сенсорных данных. Это требует современных подходов в организации системы управления (в том числе с интеллектуальными компонентами), значительных вычислительных ресурсов, создания быстродействующих алгоритмов реального времени обработки и выделения полезных сигналов сенсоров, использования эффективных сенсоров и систем обратной связи дающих интегральные характеристики рабочего пространства.
3. При использовании видеокамер и систем технического зрения в качестве сенсорных систем мобильных роботов возникает ряд задач по обработке их сигналов. Первая задача связана с использованием видеокамер в качестве измерительных систем. При определении местоположения наблюдаемых камерой ориентиров в CK робота или наоборот, позиционировании MP относительно наблюдаемых ориентиров главной задачей является достижение приемлемой точности получаемых результатов. Для достижения точности необходимо устранить систематические погрешности в сенсорной системе и определить ее неизвестные параметры, что достигается путем калибровки видеосистемы.
К простым локальным навигационным навыкам относятся задачи визуального сервоуправления, которые могут применяться для точного позиционирования, сближения с целью, следования по заданной траектории, в том числе и по направляющей линии. При визуальном сервоуправлении сигнал ошибки вычисляется СТЗ робота либо непосредственно в координатах получаемого видеокамерой изображения, либо (после кинематических преобразований) в системе координат карты, цели или робота. При использовании визуального сервоуправления необходимо разработать алгоритмы обработки изображений в СТЗ, позволяющие надежно и устойчиво вычислять сигнал ошибки по изображению в условиях шума, изменяющейся освещенности и неидеальностей наблюдаемого камерой объекта. Поскольку сигнал ошибки вычисляется непосредственно по данным изображения, то синтез визуальных серворегуляторов может быть упрощен, и даже выполнен в режиме обучения, что позволит формировать новые навигационные навыки без программирования, по мере необходимости.
Поэтому, при использовании видеокамер в качестве сенсоров мобильного робота актуальными вопросами повышения точности движения и позиционирования MP при выполнении локальных навигационных задач является разработка методов измерения координат наблюдаемых камерой объектов, методов калибровки параметров видеосистемы для снижения погрешностей дан- 35
пых измерений, алгоритмов вычисления сигнала ошибки по изображению, а также новых подходов для синтеза визуальных серворегуляторов.
4. Точное управление движением и позиционированием MP связано с необходимостью получения точной модели его рабочего пространства и осуществления точного позиционирования MP в нем, что требует больших трудозатрат и вычислительных ресурсов. Поэтому перспективным является разработка комбинированных методов управления движением MP, сочетающих глобальные методы управления движением MP во всем РП с невысокой точностью, и локальные навигационные методы, выполняющие точное позиционирование MP в заданных участках РП.
Использование видеокамер и визуального сервоуправления наилучшим образом подходят для реализации локальных методов точного позиционирования MP. При этом необходимо связать заданные местоположения точек позиционирования с набором наблюдаемых видеокамерой в их окрестности ориентиров. При повторном выходе с оговоренной погрешностью в окрестность точек позиционирования следует распознать ранее выделенные ориентиры и вычислить сигнал ошибки для серворегулятора непосредственно на изображении. Такой подход позволит реализовать замкнутый контур высокоточного управления MP в связанной с ориентирами системе координат, без явного использования в нем информации о координатах робота. При этом управление будет нечувствительным к погрешностям определения местоположения робота и позволит компенсировать накапливающиеся погрешности в автономной системе навигации или погрешности задания маршрута на карте, а также быстро перенацеливать и переобучать MP на достижение новых целей. Использование естественных ориентиров связанных с характерными элементами объектов РП в окрестности точки позиционирования позволит выполнять точное позиционирование MP в неорганизованном рабочем пространства, что увеличивает автономность MP и делает возможным позиционирование MP относительно произвольных целей.
Следовательно, разработка методологии точного позиционирования мобильного робота в локальной области его рабочего пространства с использованием видеокамеры в качестве сенсора является актуальной задачей. Данная методология должна включать как методы управления движением MP, так и методы обработки информации с видеосенсоров (обнаружение и распознавание ориентиров). Решение этой задачи позволит получить эффективную комбинацию глобальных и локальных методов навигации MP, в которой снижены требования по точности движения (и по вычислительным затратам) к гло- 86
бальным методам при сохранении возможности точного позиционирования при выполнении отдельных операций.
5. Управление мобильными роботами сильно осложнено тем, что рабочие среды в которых они функционируют плохо подготовлены для их работы. Кроме того, сенсоры мобильных роботов обеспечивают систему управления неполной информацией о рабочем пространстве и о состоянии робота, которая дополнительно содержит ошибки и шум (пробуксовка колес, ложные отражения эхолотов и др.). Кинематические и динамические модели движения робота также являются неточными из-за неопределенности ряда параметров робота и рабочей среды или их изменения во время функционирования. Существенным фактором является и то, что рабочая среда MP, как правило, не является статичной из-за наличия в ней динамических объектов.
Неопределенности параметров и погрешности сенсорной системы счисления пути (одометрической системы) приводят к тому, что ее информация может использоваться только для решения краткосрочных задач управления MP на коротких маршрутах. При решении глобальных навигационных задач, местоположение MP, вычисленное на основании данных одометрической системы необходимо периодически уточнять с использованием других сенсорных систем робота, например, по опорным ориентирам с известными координатами в CK карты. При использовании видеокамер и визуальных ориентиров необходимо иметь надежный метод определения (уточнения) местоположения MP в его рабочем пространстве на основе информации об обнаруженных ориентирах. При этом надо учитывать, что РП может содержать большое количество визуально одинаковых ориентиров (например, дверных проемов, штепсельных розеток, окон, углов комнат, отопительных приборов, и др.). Метод определения местоположения должен корректно работать в условиях такой неоднозначности.
Метод определения местоположения MP должен в автономном режиме (без помощи извне) решать следующие задачи: (а) определять местоположение MP без предварительной информации об его текущем местоположении;
(б) устойчиво определять местоположение при движении MP;
(в) восстанавливать корректное местоположение после ошибок и сбоев. Кроме того, метод должен быть эффективным с точки зрения минимального потребления вычислительных ресурсов бортового компьютера для использования его в практических задачах в режиме реального времени (или близком к нему).
Таким образом, разработка эффективных и надежных методов автономного определения и коррекции местоположения MP на основе данных сенсоров 87
робота в доступном ему рабочем пространстве является одним из ключевых и актуальных проблем в мобильной робототехнике и напрямую связана с точностью движения и глобальной навигации MP. Видеокамеры являются одним из перспективных видов сенсоров для использования при локализации.
Задачи обеспечения точности, производительности и достоверности выполнения вспомогательных и специальных операций мобильными роботами
6. Развитые сенсорные системы, значительные вычислительные мощности, мобильность современных роботов при их дооснащении специализированным оборудованием и программным обеспечением делают их мощным инструментом автоматизации вспомогательных и специальных контрольнодиагностических операций. Такими операциями, например, являются видеоинспекции инженерных объектов и сооружений в опасных и агрессивных средах, контрольно-диагностические операции при периодических обследованиях.
Визуальный контроль и обследования конструкций и сооружений в опасных или труднодоступных средах (например, под водой) являются одними из перспективных областей применения мобильных роботов, в том числе телеуправляемых. Задачами визуального контроля является обнаружение дефектов и повреждений обследуемых объектов, негативных воздействий окружающей среды. В качестве сенсоров при визуальном контроле объектов могут использоваться штатные видеокамеры MP, а для автоматической обработки поступающей от видеокамер информации - штатные методы и алгоритмы обработки изображений СТЗ MP. Автоматизация визуального контроля заключается в автоматическом выявлении ряда типовых дефектов в получаемых видеокамерами робота изображениях с последующим автоматическим созданием протокола обследования с информацией об обнаруженных дефектах и дополнительными данными (местоположение робота, состояние внешней среды и т.п.). Практический эффект от автоматизации визуального контроля состоит в уменьшении нагрузки на оператора мобильного робота, что позволяет повысить точность управления движением робота, производительность и достоверность контрольно-диагностических операций, а также в возможности выполнения контроля автономными мобильными роботами без какого-либо участия человека.
Визуальные сенсоры в задачах контроля и диагностики могут эффективно дополнять аналогичную информацию, полученную от сенсоров и измерительных систем другого вида (например, от тепловизионных камер). Решив задачу объединения визуальной информации и информации других сенсоров можно
представлять диагностические данные в удобной для анализа форме, переходить от качественного анализа к количественному, соотносить диагностическую информацию с наблюдаемыми видеокамерами объектами. Задачами такого типа является автоматическая обработка и анализ данных при обследовании оборудования или инженерных сооружений с использованием тепловизионных камер, когда температурное поле объектов автоматически соотносится с изображением этих объектов. Реализация данного подхода позволит получить существенный эффект с точки зрения производительности и качества периодических диагностических осмотров.
Видеосистемы мобильных роботов могут использоваться в качестве резервных сенсорных систем для вычисления (измерения) критически важных параметров движения мобильного робота в случае сбоя или временной недоступности основной системы. Задачей такого типа является использование видеосистемы для определения горизонтальной скорости относительно поверхности земли беспилотного летательного аппарата (воздушного MP) за счет анализа движения изображения поверхности в кадре.
При использовании видеосистем для выполнения вспомогательных (резервный датчик скорости, распознавание образов) и специальных (различные контрольно-диагностические операции) актуальными задачами являются разработка алгоритмов, методов и программных комплексов для обработки изображений позволяющих эффективно, надежно и достоверно извлекать необходимую информацию из получаемых видеокамерами изображений и точно сопоставлять данную информацию с данными других сенсорных систем.
Проиллюстрируем эти актуальные направления исследований (1- 6) в проблеме повышения точности движения и позиционирования MMP на структурной схеме (рис. 1.10) системы управления MMP (указанные выше направления исследований обозначены на схеме стрелками с сохранением их нумерации). Мобильный манипуляционный робот (включающий манипулятор и мобильную платформу) как объект управления (ОУ) охвачен обратной связью по координатам и параметрам состояния. Носителями обратной связи являются датчики программного движения, а при усложнении конструкции и решаемых MMP задач - в ОС необходимы дополнительные датчики (силы, деформации, наличия препятствий и т.д.) и интегральные сенсоры сканирования рабочего пространства (видеокамеры, ультразвуковые локаторы и т.д.). Обработка информации датчиков и сенсоров должна выполняться в реальном масштабе времени (в условиях ограниченных вычислительных ресурсов), что приводит к требованиям
по повышению производительности методов ее обработки (направления исследований 3,4,5 на рис. 1.10).
При выполнении MMP специальных операций, в частности, контрольнодиагностических и инспекционных задач, могут использоваться как штатные сенсоры робота (видеокамеры), так и специальные сенсоры и датчики (инфракрасные камеры, ультразвуковые, электромагнитные датчики и др.). В связи с этим возникают задачи обработки сигналов штатных или специальных сенсоров для получения новой информации об обследуемых объектах (направление исследований 6). К методам и алгоритмам, используемым в данных задачах, предъявляются аналогичные требования по производительности и минимизации вычислительных затрат.
Для обеспечения задач точности движения и позиционирования помимо обработки сигнала ОС (изображения) требуется также формирование законов и алгоритмов управления (сервоуправления) блока управления (БУ) на основе этих сигналов. Такие алгоритмы управления предлагаются и моделируются в рамках направлений исследований 3 и 4 (см. рис. 1.10). При этом одновременно предлагается и метод наращивания вычислительных ресурсов бортового компьютера путем формирования распределенной вычислительной сети, что актуально для MMP действующих в помещениях.
Точность движения и позиционирования упругого манипулятора MMP предлагается повысить в рамках первого указанного выше подхода, уточняя программную координату PO путем математического моделирования управляемого движения упругого манипулятора. Адекватная математическая модель упругого манипулятора с учетом неидеальностей (нелинейности и переменности характеристик) позволяет решать задачи точного управления движением при воздействии на манипулятор статических и динамических нагрузок, а также при работе на границе устойчивости. Кроме этого такая модель позволит решать задачи проектирования и оптимизации параметров таких манипуляторов (не рассматриваемых в данной диссертации).
Статическая точность позиционирования PO в точке может быть обеспечена путем компенсации упругих отклонений для текущей конфигурации манипулятора, полученных на распределенной конечноэлементной модели упругого манипулятора (направление исследований 1, на рис. 1.10). Для обеспечения динамической точности при движении PO по заданной траектории необходимо использовать вычислительно эффективные модели манипулятора, позволяющие рассчитывать упругие отклонения PO в масштабе времени близком к реальному.
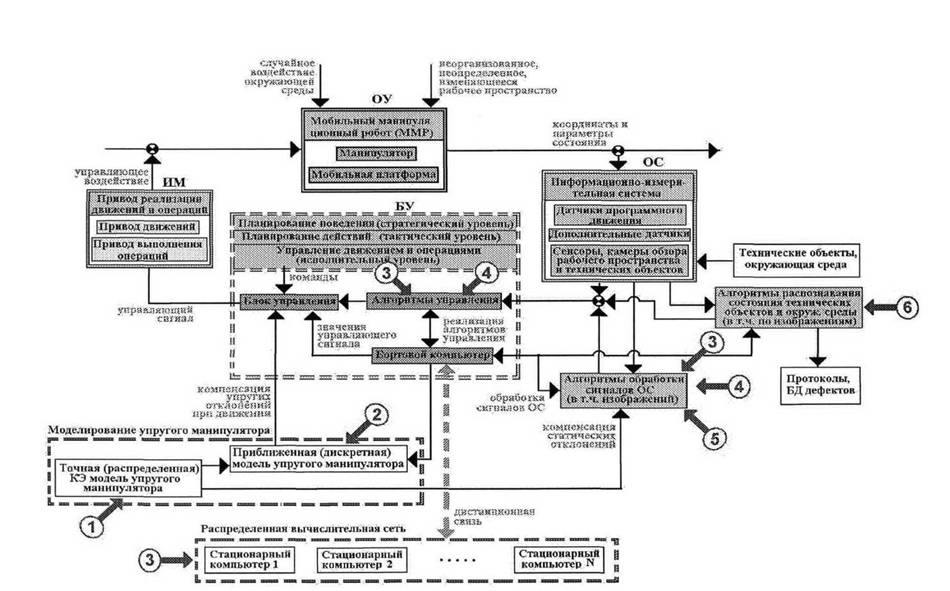
Рис. 1.10. Структурная схема системы управления мобильных манипуляционных роботов и направления
исследовании
В роли вычислительно эффективных моделей могут выступать приближенные (дискретные) модели упругого манипулятора. Точность отслеживания траектории PO и снижение его колебаний в конце хода обеспечивается путем динамической компенсации приводами манипулятора упругих перемещений PO при его движении в пространстве (направление исследований 2 на рис. 1.10). Качество и адекватность дискретной модели может оцениваться путем ее верификации на распределенной модели
1.7.
Еще по теме Проблема обеспечения точности движения и позиционирования мобильных манипуляционных роботов:
- Задачи локализации и точного позиционирования мобильных роботов
- Вероятностная модель движения мобильного робота
- Обработка изображения для задачи движения мобильного робота по направляющей
- Системы технического зрения и проблемы обработка видеоинформации в задачах управления мобильных роботов
- Позиционирование робота относительно визуальных ориентиров
- Разновидности и области использования мобильных роботов
- Кинематическая модель мобильного робота с дифференциальным приводом
- Схема предлагаемого контрольно-диагностического мобильного робота
- Позиционирование объектов относительно робота по информации с визуальных сенсоров .
- Постановка задачи визуального сервоуправления с целью точного позиционирования робота
- Использование систем технического зрения для позиционирования объектов относительно робота в локальных навигационных задачах
- Математические модели упругих манипуляторов мобильных роботов с учетом нелинейных свойств
- Автоматизированный контроль состояния подводных объектов видеосистемой мобильных роботов в реальном масштабе времени
- Увеличение неопределенности местоположения робота при использовании вероятностной модели движения
- Актуальные проблемы мобильной робототехники
- Фигура «слушателя» и проблема точности
- 24. Нарушение произвольных движений и действий. Проблема апраксий. Нарушения движений при поражении разных уровней экстрапирамидной системы: коры, подкорковых образований.
- 10.3 Психология обеспечения безопасностидорожного движения