Определение различных конфигураций манипулятора
Для манипуляторов типа Пума и других манипуляторов с вращательными сочленениями возможны различные типы конфигурации, которые определяются по аналогии с геометрией руки человека.
Типы конфигурации манипулятора устанавливаются следующим образом (рис. 4.2):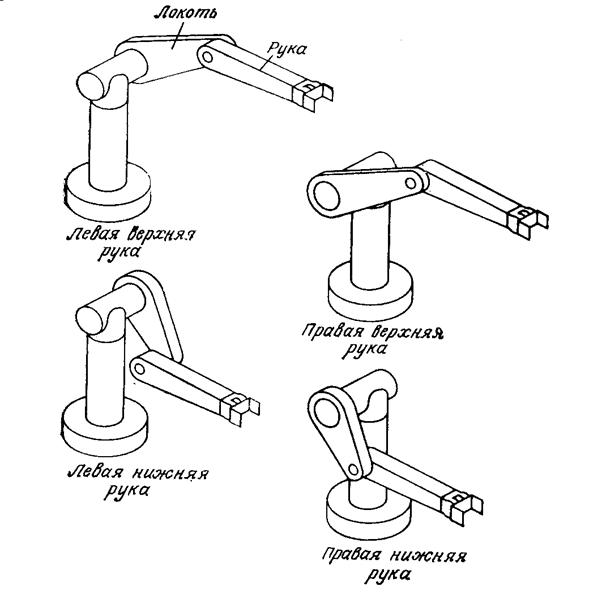
Рисунок 7.1. Определение различных конфигураций манипулятора
ПРАВАЯ РУКА: При неподвижном 3-м сочленении увеличение угла  приводит к увеличению координаты запястья по оси z0.
приводит к увеличению координаты запястья по оси z0.
ЛЕВАЯ РУКА: При неподвижном 3-м сочленении увеличение угла приводит к уменьшению координаты запястья по оси z0.
ВЕРХНЯЯ (локоть выше запястья) РУКА: Положение запястья {ПРАВОЙ/ЛЕВОЙ} руки по отношению к системе координат плеча характеризуется {отрицательным/положительным} значением координаты по оси y2.
НИЖНЯЯ (локоть ниже запястья) РУКА: Положение запястья {ПРАВОЙ/ЛЕВОЙ} руки по отношению к системе координат плеча характеризуется {положительным/отрицательным} значением координаты по оси y2.
КИСТЬ ВНИЗ: Скалярное произведение единичного вектора s системы координат схвата и единичного вектора y5 системы координат (х5, у5, z5) положительно.
КИСТЬ ВЕРХ: Скалярное произведение единичного вектора s системы координат схвата и единичного вектора y5 системы координат (х5, у5, z5) отрицательно.
Каждый из трех индикаторов конфигурации звеньев может быть определен следующим образом:
РУКА= (7-2)
(7-2)
ЛОКОТЬ= (7-3)
(7-3)
ЗАПЯСТЬЕ= (7-4)
(7-4)
В дополнение к этим индикаторам существует ПЕРЕКЛЮЧАТЕЛЬ:
ПЕРЕКЛЮЧАТЕЛЬ=
(7-5)
Значения индикаторов и переключателя задаются исследователем до начала решения обратной задачи кинематики.
Еще по теме Определение различных конфигураций манипулятора:
- Уравнения вида конфигурации для определения индикаторов конфигурации манипулятора
- Схемы линейной расстановки башенных кранов с учетом различной конфигурации зданий
- Слово как основная единица лексико-семантического уровня языка. Другие ед-цы этого уровня. Об определении слова. Различные подходы к определению слова. Проблемы отдельности. Дифференциальные признаки.
- 1.1 Различные подходы к определению алгоритма:
- Избирательный процесс: различные подходы к определению, понятие и особенности
- 2.10. Школа конфигурации
- 4.3 Определение поверхностного натяжения различных фракций агрегатов молотого мергеля
- § 14. Семантика вида: различные подходы к определению граммем СВ и НСВ
- Критика школы конфигурации:
- Базовая аппаратная конфигурация