Автоматизация обнаружения дефектов подводных сооружений
Роботизированные видеоинспекции входят в число регламентных работ, выполняемых для поддержания надежной эксплуатации подводных объектов и сооружений: фундаментов и оснований, трубопроводов и кабелей, заградительных сооружений, и т.д.
Использование подводных роботов является практически единственным способом проведения данного вида работ из-за чрезвычайно опасной для работы человека подводной среды, большой протяженности инспектируемых объектов и длительности самих инспекций. Автоматизация видеоинспекций позволяет снизить нагрузку на операторов подводных роботов в процессе инспекций, а также значительно сократить время составления отчета об инспекции после ее проведения.Задачей системы обработки изображений являлось автоматическое обнаружение в реальном времени типовых дефектов подводных сооружений и составление отчета о проведенной инспекции в базе данных с изображениями обнаруженных дефектов. Проблема была осложнена низким качеством подводных видеоизображений — мутная вода с неорганическими включениями и микроорганизмами, плохое и неравномерное освещение, цветовые сдвиги, и пр. На рис. 7.3 приведены примеры подводных видеоизображений с различными ти-
личными дефектами: а) обросшая ракушечником стена конструкции; б) трещина в бетонной опоре сооружения; в) пораженный ракушечником уча
сток трубопровода.
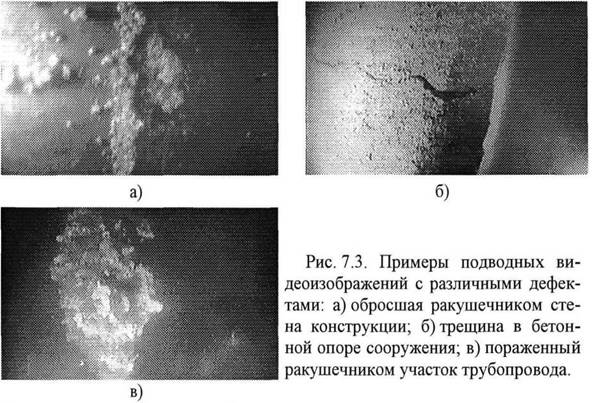
Скопления морских ракушек (рис. 7.3,а,в) — неструктурированные колонии
организмов ракушечника живущие на инспектируемых сооружениях. Колонии
ракушечника оказывают разрушительное влияние на поверхности подводных сооружений. Отсутствие структуры в этих колониях и их хаотическое расположение затрудняет использование геометрических параметров для обнаружения их в изображениях. Поэтому алгоритм распознавания колоний морских ракушек на изображениях, разработанный нами, основан на статистических методах классификации моделей.
Для разработки алгоритма необходимо было найти набор статистических параметров, которые помогут различать изображения с морскими ракушками от изображений без них. Вычислительные ограничения обработки изображений в реальном масштабе времени требовали реализации алгоритма с минимальными затратами на вычисление.На базе рассмотренной выше системы обработки изображений была разработана программа UWScan для автоматизации обнаружения некоторых дефектов подводных сооружений [309]. Главное окно программы UWScan показано на рис. 7.4. Оно включает меню пользователя, окно просмотра видеоизображений (используется для визуализации результатов обработки изображения и предварительной обработки), поля для ввода названия и географических коор-
динат места видеоинспекции, цель и время проведения инспекции, параметры системы управления роботом, кнопку старта или останова автоматизированного обнаружения дефектов, информацию о режиме работы программы.
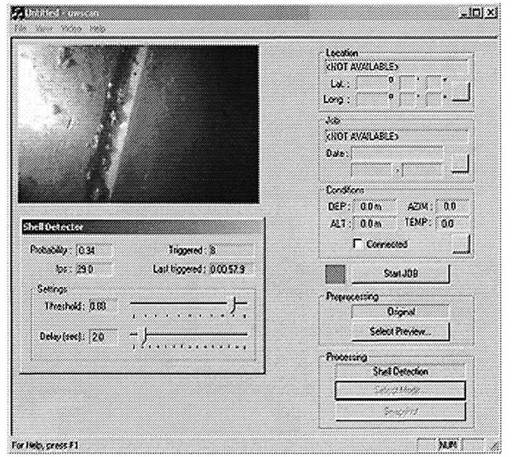
Рис. 7.4. Главное окно программы UWScan.
Источником видеокадров был аналоговый видеосигнал, который оцифровывался видеокартой персонального компьютера. Через последовательный RS232C интерфейс в программу также поступала дополнительная информация от системы управления роботом о его текущем положении (глубина, азимут, уровень поверхности воды) и состоянии среды за бортом (температура воды). Эти дополнительные параметры напрямую не использовались при анализе изображений алгоритмами программы, но их текущие значения на момент обнаружения дефекта сохранялась в БД с отчетом о видеоинспекции.
База данных с отчетом о видеоинспекции имеет структурированный иерархический вид, где каждый обнаруженный дефект привязывается к месту проведения инспекции (название, географические координаты), а также группируются по времени и по виду выполняемых работ. Каждая запись о дефекте в БД отчета включает в себя следующую информацию: тип дефекта; изображение с обнаруженным дефектом (сохраняется в отдельном JPEG файле, в базе данных хранится имя файла); точное время обнаружения дефекта; текущие параметры, 326
полученные от системы управления роботом.
7.1.4.
Еще по теме Автоматизация обнаружения дефектов подводных сооружений:
- Разработка алгоритма обнаружения наростов ракушечника на сооружениях
- Обнаружение естественных ориентиров па базовом изображении и автоматизация этой операции
- Автоматизированный контроль состояния подводных объектов видеосистемой мобильных роботов в реальном масштабе времени
- 2. Основные понятия и определения: механизация, автоматизация, единичная и комплексная механизация и автоматизация. Стадии автоматизации
- § 4. Аренда зданий и сооружений (ст. 650-655) 223. Возможно ли арендовать часть здания или сооружения?
- Фазы и уровни компенсации. Стадии компенсации дефекта у ребенка (Солнцева). Компенсаторный фонд и личностные предпосылки преодоления дефекта.
- §4. Аренда зданий и сооружений Статья 650. Договор аренды здания или сооружения
- 6.1.2. Дефекты и деформации правосознания
- Секториальное распределение дефектов структуры
- Объемные дефекты
- 4. Особенности автоматизации машиностроения
- 29. Автоматизация контроля
- Основные подходы к автоматизации предприятий.
- 9. Соотношение первичного и вторичного в структуре дефекта как параметр псих дизонтогенеза.
- 5.5 Взаимодействие импульса CO2- лазера с радиационными дефектами в ЩГК