Лекция № 11. Автоматизация процесса перемешивания
Общая характеристика процессов перемешивания в жидких средах.
Перемешивание - гидромеханический процесс взаимного перемещения частиц в жидкой среде с целью их равномерного распределения во всем объеме под действием импульса, передаваемого среде мешалкой, струей жидкости или газа.
Цели перемешивания
♦ Создание суспензий - обеспечение равномерного распределения твердых частиц в объеме жидкости;
♦ Образование эмульсий, аэрация - равномерное распределение и дробление до заданных размеров частиц жидкости в жидкости или газа в жидкости;
♦ Интенсификация нагревания или охлаждения обрабатываемых масс;
♦ Интенсификация массообмена в перемешиваемой системе (растворение, выщелачивание).
Основные схемы перемешивания.

■ Механическое - перемешивание мешалками, вращающимися в аппарате с перемешиваемой средой.
■ Барботажное - перемешивание путем пропускания через жидкую среду потока воздуха или газа, раздробленного на мелкие пузырьки, которые, поднимаясь в слое жидкости под действием Архимедовой силы, интенсивно перемешивают жидкость.
■ Циркуляционное перемешивание - перемешивание, осуществляемое путем создания многократных циркуляционных потоков в аппарате с помощью насоса.
Объект управления
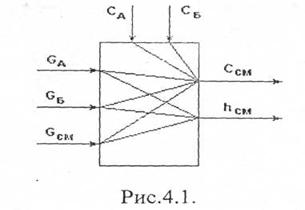
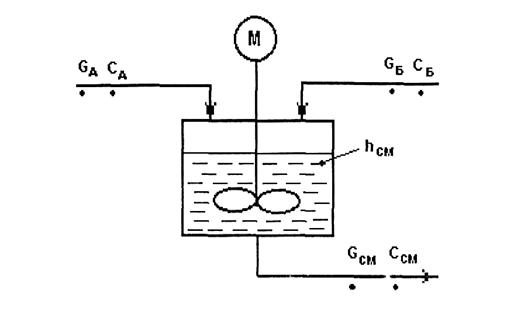
Объект управления - емкость с мешалкой, аппарат непрерывного действия, в котором смешиваются две жидкости А (с концентрацией целевого компонента Са) и Б (с концентрацией целевого компонента Сб) для получения гомогенизированного раствора с заданной концентрацией целевого компонента Сем.
Схема объекта управления.
Рис. 1.1.
Показатель эффективности процесса - концентрация целевого компонента в гомогенизированном растворе (смеси) - Сем.
Цель управления процессом - обеспечение заданной концентрации смеси при эффективном и интенсивном перемешивании.
Эффективность перемешивания обеспечивается выбором параметров аппарата, перемешивающего устройства, числа оборотов мешалки, обеспечивающих равномерность концентрации смеси в аппарате с заданной интенсивностью (т.е. за заданное время).
Однако в реальных условиях технологические объекты подвержены действию внешних и внутренних возмущений, которые приводят к отклонению технологических режимов работы от расчетных.
Задача разработки системы автоматизации обеспечить в условиях действия внешних и внутренних возмущений в процессе эффективное и интенсивное его функционирование с требуемыми характеристиками качества.
Теоретические аспекты процесса механического перемешивания
• При вращении лопасти мешалки в аппарате возникает вынужденное движение жидкости. которое описывается критериальным уравнением вида:
где
• модифицированный критерий Эйлера EuN, :

• модифицированный критерий Рейнольдса ReM
• геометрический симплекс Г: 
где ём - диаметр мешалки, м;
п - скорость вращения мешалки, об /с;
р - плотность жидкости, кг/мА3;
NM - мощность, потребляемая мешалкой, вт;
р, - динамическая вязкость, Па*с;
Kn - критерий мощности.
Методика расчета конструктивно-технологических параметров процесса механического перемешивания.
1. Выбирают тип мешалки, ее диаметр dM. Размеры аппарата DАПП и НАПП.
2. Определяют коэффициент Ст в зависимости от размеров аппарата и тина перемешивающего устройства.
3. Определяют число оборотов мешалки: 
4. Рассчитывают ReM по соотношению (3).
5. По графику KN = f(ReM) находят KN
6. Рассчитывают NM из выражения (2):
 |
7. Рассчитывают мощность Нцв, потребляемую приводом перемешивающего устройства:
 |
где К - поправочный коэффициент, учитывающий конструктивные особенности аппарата и перемешивающего устройства; rinep - к.п.д. передачи.
В реальной установке непрерывного действия :
 |
Материальный баланс по целевому компоненту
Уравнение динамики:

Уравнение статики при 
На основании (1) (2) можно принять:
Материальный баланс по всему веществу
Уравнение динамики:

Уравнение статики при 
На основании (4) (5) можно принять:

 |
Информационная схема
• Управляемые переменные - Ссм и hCM .
• Возможные контролируемые возмущения: СА,СБ, причем задано, что СЛ » СБ.
• Возможные управляющие воз действия :GA,GE,GCM.
• Однако, в данном случае, GCM определяется последующим технологическим процессом и поэтому не может использоваться в качестве регулирующего воздействия.
Анализ уравнения динамики на основе материального баланса по целевому компоненту
Уравнение динамики в нормализованном виде

Начальные условия для вывода передаточной функции по каналу управления GА-ССМ
 |
Уравнение статики
 |
Уравнение динамики в приращениях:
(после постановки начальных условий в выражение (1), вычитания уравнения статики(2) и приведения подобных членов):

Уравнение динамики с безразмерными переменными:

Нормализованное уравнение динамики объекта во временной области без учёта транспортного запаздывания:

Уравнение динамики по каналу управления GА-ССМ во временной области с учётом транспортного запаздывания:

Передаточная функция объекта по каналу управления GА-ССМ :

где:
где VТРУБ – объём трубопровода от Р.О. до входа в аппарат.
Анализ уравнения динамики на основе материального баланса по всему веществу
Уравнение динамики:

Начальные условия для вывода передаточной функции по каналу управления GБ-hCM:

Уравнение статики:

Уравнение динамики в приращениях:
(после подстановки начальных условий в выражение (1), вычитания уравнения статики (2) и приведения подобных членов)

Уравнение динамики с безразмерными переменными:

Нормализованное уравнение динамики объекта во временной области:

Уравнение динамики по каналу управления GБ-hCM во временной области с учётом транспортного запаздывания:

Передаточная функция объекта по каналу управления GБ-hCM:

где:

Анализ статической характеристики объекта
Уравнение статики на основе материального баланса по целевому компоненту:

Из уравнения (1) выразим  в явном виде: в явном виде: |

Анализ выражения (2) показывает, что:
• Статическая характеристика линейная по каналам: СА - Ссм; Сь - Ссм;
• Статическая характеристика нелинейная по каналам G Л - Ссм; G Б - Ссм.
Линеаризованное представление статистической характеристики на основе стабилизации соотношения расходов  :
:

Линеаризованное представление статической характеристики через разложение в ряд Тейлора:

Обозначим:

Линеаризованное представление приращения выходной переменной через приращения всех возможных входных переменных:
Типовая схема автоматизации процесса перемешивания

Типовое решение автоматизации.
1. Регулирование
• Регулирование концентрации Ссм по подаче реагента GA - как показателя эффективности процесса перемешивания с целью получения гомогенизированного раствора.
• Регулирование уровня в аппарате hCM по подаче реагента Gb - для обеспечения материального баланса по жидкой фазе.
2. Контроль.
• расходы - GA, Gk, Gcm ;
• концентрация - Ссм;
• уровень - hCM-
3. Сигнализация.
• существенные отклонения Ссм и hCM от задания;
• резкое падение расходов исходных реагентов GA^ или GB^, при этом формируется сигнал «В схему защиты».
4. Система защиты.
По сигналу «В схему защиты» - отключаются магистрали подачи реагентов GA , GB и отбора смеси GCM.
Еще по теме Лекция № 11. Автоматизация процесса перемешивания:
- Исследование процесса перемешивания компонентов смеси на натурной модели
- Исследование процесса перемешивания компонентов смеси на лабораторной установке планетарного смесителя.
- Лекция №16. Автоматизация абсорбционных и выпарных установок
- Лекция №13. Особенности автоматизации испарителей и конденсаторов
- Лекция №15. Автоматизация ректификационных установок
- 2. Основные понятия и определения: механизация, автоматизация, единичная и комплексная механизация и автоматизация. Стадии автоматизации
- 25. Трудоемкость сборки и особенности ее автоматизации. Переходы сборочных процессов
- Автоматизация производственных процессов и роль в них измерений
- Заключительный этап (автоматизация процесса голосообразования)
- 83. Корпоративная информационная система - это открытая интегрированная автоматизированная система реального времени по автоматизации бизнес-процессов компании всех уровней, в том числе и бизнес-процессов принятия управленческих решений