Подсистема оценки
Одновременно с адаптацией индивидуальной модели объекта происходит обучение нейронных сетей подсистемы оценок: классификатора динамических моделей и нейросети выявления нарушений.
Нейросетевые алгоритмы основываются на оптимальном Байесовском обнаружителе [83] для минимизации суммы условных вероятностей ошибок, накопленной информационной базе данных предыдущих объектов данного типа, образе (модели) объекта контроля (тех.паспорт здания или сооружения, пределы угловых колебаний, история болезни пациента) и статистической информации о нарушениях и отклоненияхнорм параметров объектов контроля данного класса.
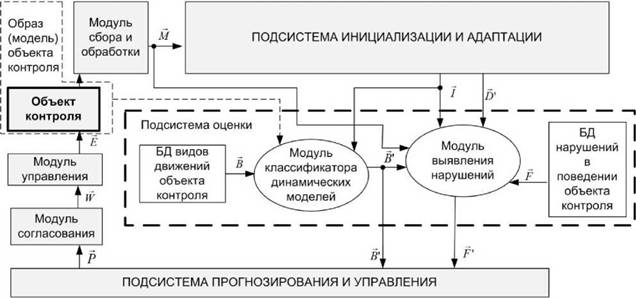
Рисунок 17- Модель обработки информации. Подсистема оценки
Основой определения образа модели объекта гониометрического контроля является ряд параметров:
- расстояния между точками отсчета (плечи кинематических звеньев);
- допустимые углы наклона и их ограничения;
- особенности объекта контроля (технический паспорт модели здания, история болезни пациента).
58 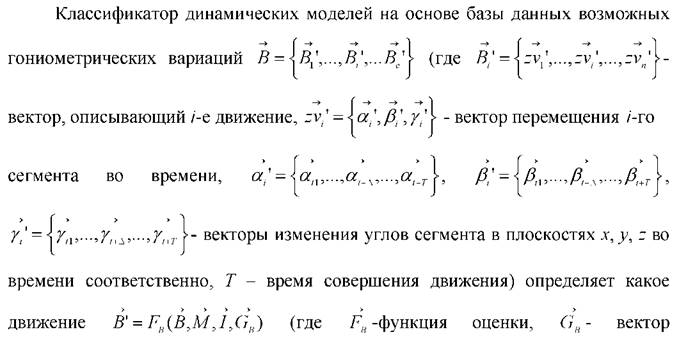 дополнительных параметров и факторов) объект совершает в текущий момент времени t.Тем самым прогнозируется характер двигательной активности в момент времени t+Δ,где Δзависит от точности оценки движения и скорости движения объекта. В случае контроля многоэтажных зданий и сооружений, под движением понимается отклонение осей здания от вертикали. В случае контроля сложных объектов и систем (человек, мехатронная установка) под движением следует понимать определенное шаблонное двигательное действие, характерное конкретному звену или цепи последовательно соединенных звеньев (сгибание руки, ротация кисти и т.д. ).
дополнительных параметров и факторов) объект совершает в текущий момент времени t.Тем самым прогнозируется характер двигательной активности в момент времени t+Δ,где Δзависит от точности оценки движения и скорости движения объекта. В случае контроля многоэтажных зданий и сооружений, под движением понимается отклонение осей здания от вертикали. В случае контроля сложных объектов и систем (человек, мехатронная установка) под движением следует понимать определенное шаблонное двигательное действие, характерное конкретному звену или цепи последовательно соединенных звеньев (сгибание руки, ротация кисти и т.д. ).
Далее на основании имеющихся данных, включая базу данных нарушений
 , производится постановка возможного диагноза (нарушения
, производится постановка возможного диагноза (нарушения
где Ff- функция выявления нарушений. 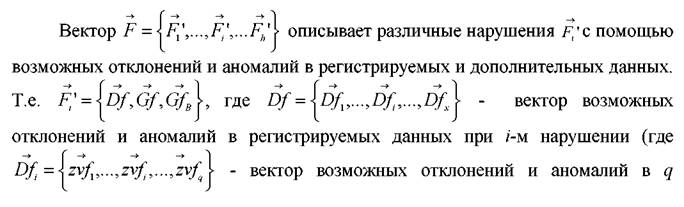
59

2.2
Еще по теме Подсистема оценки:
- Атрибуты языковой системы. Лексика как подсистема, ее связь с другими подсистемами языка. Специфика лексического состава языка.
- 5.3. Подсистемы и уровни правовой системы
- Экономическая подсистема общества
- Подсистема контроля и анализа качества подготовки специалистов.
- Взаимосвязь между подсистемами системы “Библиотека”
- Подсистема управления качеством ресурсного обеспечения учебного процесса.
- 14. Фонетические подсистемы и выразительные возможности фонетики.
- Подсистема “Библиотечный персонал”
- Подсистема адаптации гониометрической модели
- Понятие и структура подсистемы информационного обеспечения
- Иудейское право как подсистема общей системы израильского права
- Подсистема “Библиотечный фонд”
- Подсистема “Контингент пользователей”
- Основными подсистемами СП государства являются:
- 1.2. Современное общество и его подсистемы
- Глава 10. Оценка недвижимости – оценка своих возможностей
- 6. Характеристика подсистемы социально-экономических отношений.
- 37. Основные подсистемы мезоэкономики на примере агропромышленного комплекса
- Рынок труда - важнейшая подсистема рыночной экономики