Калибровка кинематических параметров модели видеокамеры на вращающейся платформе
Рассмотрим мобильный сервисный робот [307,308], конструктивная схема которого приведена на рис.4.1. На рис.4.3 показаны системы координат робота и камеры. Ориентация и положение камеры определяются кинематическими параметрами робота а, углами вращения головы робота θh,углами поворота камеры θpи ее наклона θt.В качестве камеры была использована камера SONY EVI-G20 с размером CCD матрицы 1/4 дюйма.
Преобразование между системой координат робота и системой координат одной из его камер может быть выражено в виде  где
где вектор координат точки в системе координат камеры;
вектор координат точки в системе координат камеры;
 матрица ортогонального преобразования координат; 0h,θp,Θtуглы поворота головы робота, поворота и наклона камеры соответственно;
матрица ортогонального преобразования координат; 0h,θp,Θtуглы поворота головы робота, поворота и наклона камеры соответственно;  вектор кинематических параметров. Для вычисления
вектор кинематических параметров. Для вычисления может быть использована любая подходящая кинематическая формулировка. В данном случае для получения кинематических преобразований мы использовали формулировку Денавита-Хартенберга. Обратное преобразование из системы координат робота в систему координат камеры задается обратной матрицей
может быть использована любая подходящая кинематическая формулировка. В данном случае для получения кинематических преобразований мы использовали формулировку Денавита-Хартенберга. Обратное преобразование из системы координат робота в систему координат камеры задается обратной матрицей 
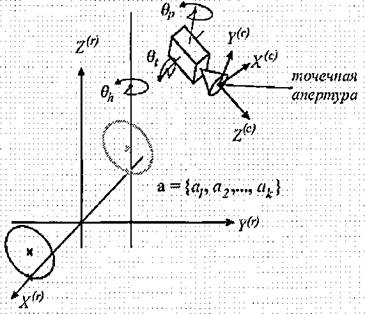
Рис.4.3. Системы координат робота и вращающейся камеры
Матрица преобразования включает в себя ряд параметров (заданных в векторе а) точные значения которых неизвестны по ряду причин.
включает в себя ряд параметров (заданных в векторе а) точные значения которых неизвестны по ряду причин.
где - наблюдение і-той точки в системе координат, связанной с камерой,
- наблюдение і-той точки в системе координат, связанной с камерой,  координаты этой точки в системе координат робота,
координаты этой точки в системе координат робота, - углы,
- углы,
соответствующие наблюдению
Процедуру определения внешних параметров можно упростить, предположив, что начало системы координат, связанное с камерой, совпадает с точечной апертурой (главной точкой изображения) и ось 'совпадает с оптической осью камеры. В нашем случае внутренние параметры камеры были определены с использованием методики, описанной в [268]
'совпадает с оптической осью камеры. В нашем случае внутренние параметры камеры были определены с использованием методики, описанной в [268]
что начало системы координат камеры совпадает с главной точкой изображения). Предполагается, что ошибки в измерении подчиняются нормальному закону распределения с нулевым отклонением от средней величины. Для более точного определения параметров калибровочные точки должны быть выбраны таким образом, чтобы они охватывали всю видимую роботом зону пространства.
В нашей задаче вектор а включал семь кинематических параметров. В тестовой задаче по калибровке было использовано 16 калибровочных точек, координаты которых были измерены с σ ≈ 1 мм. Среднеквадратическое отклонение при определении координат калибровочных точек в изображении было оценено в у 1.96 пикселей в координатах буфера платы видеозахвата (640?480). Данная
ошибка имеет три главных компоненты: несистематическая ошибка при многократном выведения вращающейся камеры в заданное положение (1.8 пикселя - определена опытным путем); ошибка дискретизации и оцифровки видеосигнала в системе CCD матрица-видеокамера-плата видеозахвата (0.71 пикселя - определена по техническим данным); остаточная ошибка калибровки камеры (0.31 пикселя - определена алгоритмом калибровки [268]). При размерах сенсора ка- •' меры 5.07?3.81 мм и эффективном фокусном расстоянии 4.3 мм указанная стан
дартная ошибка в пикселях на расстоянии 2 м от камеры (наиболее удаленная калибровочная точка) приводит к стандартной погрешности определения координат точки в 7.2 мм (в плоскости перпендикулярной оптической оси камеры).
Эффективные значения кинематических параметров а, удовлетворяющие (4.9), были получены после подстановки результатов измерений в (4.10) и решения системы (4.9)-(4.10) методом Левенберга-Марквардта. После калибровки, при использовании эффективных значений кинематических параметров, средняя ошибка (среднее квадратическое отклонение) в вычислении относительных расстояний от робота до наблюдаемых видеокамерой калибровочных точек была сокращена с 42 мм до 10 мм.
4.2.3.
Еще по теме Калибровка кинематических параметров модели видеокамеры на вращающейся платформе:
- Модель видеокамеры и ее кинематические параметры
- Кинематическая модель мобильного робота с дифференциальным приводом
- 3.1. Параметры фигичсской модели
- //./. Параметры физической модели
- 6.2. Алгоритм расчета параметров К‑модели.
- Результаты расчетов параметров процесса на модели
- Глава 11. Параметры физической модели ванны реактора и методика экспериментов
- Алгоритм Калибровка
- Глава 2. Разработка математической модели оптимизации параметров обработки рабочих цилиндрических поверхностей цапф мельниц
- Вращающиеся регенераторы
- Тайна вращающегося волчка
- Можно ли вращаться по инерции?
- 3.1.3.3. Измерения с помощью цифровых фото-видеокамер
- 3.2.3.2. Измерения с помощью цифровых фото-видеокамер