Методы нейросетевого управления, используемые в биотехнических системах
Одной из областей применения искусственных нейронных сетей (ИНС) являются системы автоматического управления. Разработано уже немало методов управления с применением ИНС. Такие методы называются методами нейроуправления.
Сводная таблица методов нейроуправления приведена на рисунке 1.1 .
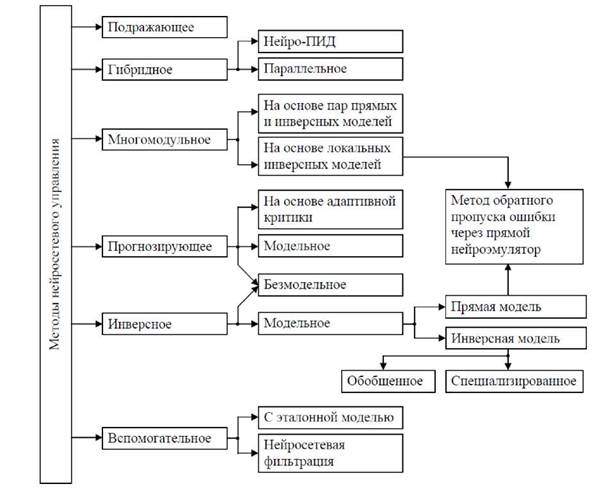
Рисунок 1.1 - Классификация методов нейроуправления
Кратко рассмотрим наиболее распространенные методы нейросетевого управления.
Подражающее нейроуправление. Основным компонентом подражающего нейроуправления является нейронная сеть (НС), обученная по принципу супервизорного обучения с использованием существующего регулятора (например ПИД-регулятора). При этом, обучающей выборкой являются примеры динамики эталонного регулятора (или в редких случаях запись поведения человека- оператора). Обучающая выборка составляется из значений входов и выходов регулятора в процессе штатного управления объектом. Схема подражающего нейроуправления представлена на рисунке 1.2: слева схема во
время процесса обучения НС, справа - во время работы в качестве регулятора [87, 93, 98].
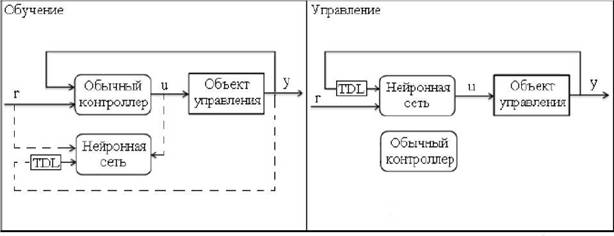
Рисунок 1.2 - Схема подражающего нейроуправления
НС обучается по одному из методов (по методу обратного распространения ошибки, например), используя полученную выборку. После этого НС полностью воспроизводит динамику регулятора, на основе которого стоилась обучающая выборка, и может быть включена в контур управления вместо прежнего регулятора.
Подражающее нейроуправления - самый простой способ применения нейронных сетей в истемах автоматического управления (САУ). Однако этот метод имеет ряд недостатков. Одним из главных недостатков является необходимость наличия регулятора, заранее настроенного для управления имеющимся объектом, для получения обучающей выборки.
Полученный таким образом нейросетевой регулятор не сможет обеспечить качество управления лучшее, чем исходный регулятор. В связи с вышесказанным, данный метод нейроуправления используют чаще всего для первичного обучения НС, с целью последующего дообучения по другим методикам.Инверсное нейроуправление. Существует несколько вариантов рассматриваемого метода управления. Основным является обобщенное (или прямое) инверсное нейроуправоление. Этот метод подразумевает обучение НС на
основе данных, полученных с объекта управления (ОУ). В качестве входного сигнала ОУ и выходного значения обучающей выборки для НС используется некоторый случайный процесс. В качестве входных данных обучающей выборки нейронной сети используют выход ОУ. Для обучения используют метод обратного распространения ошибки [93, 100].
После успешного обучения НС должна воспроизводить значения требуемого управляющего воздействия k в зависимости от желаемого выхода ОУ, т.е. НС должна вырабатывать управляющее воздействие, которое приведет ОУ в состояние, заданное уставкой.
Обученная таким образом НС называется инверсным нейроэмулятором. Схема обобщенного инверсного нейроуправления представлена на рисунке 1.3: слева схема в режиме обучения инверсного нейроэмулятора, справа - в режиме управления объектом. Инверсный нейроэмулятор включается в контур управления объектом в качестве регулятора [87, 93, 98].

Рисунок 1.3 - Схема обобщенного инверсного нейроуправления
Недостатком метода обобщенного инверсного нейроуправления является трудность в формировании обучающей выборки, выраженная в необходимости тщательного подбора идентифицирующего процесса. Также трудности в обучении возникают, если инверсия ОУ является неоднозначной функцией, что приводит к конфликтам в обучении из-за некорректности в обучающей выборке.
Достоинством метода является отсутствие необходимости в математической модели объекта.
Другой, более сложной разновидностью инверсного нейроуправления является метод обратного пропуска ошибки через прямой нейроэмулятор, также известный в зарубежных источниках как Backprorogation Through Time (BPTT). Данный метод основан на применении сразу двух нейронный сетей, одна из которых выступает в роли регулятора, а другая - в роли прямого нейроэмулятора.
Прямой нейроэмулятор обучается таким образом, чтобы повторять поведение объекта управления, в зависимости от поступающих на его вход воздействий. Входными воздействиями для нейронной сети, содержащимися в обучающей выборке, являются значения случайного идентифицирующего процесса и предыдущее состояние ОУ, а желаемые выходные значения - это выход ОУ при заданном входе. В итоге, сеть считается обученной, если при одинаковых входных значениях, поступивших на нее и на ОУ, их выходы будут отличаться не более чем на заданную малую величину.
После того, как прямой нейроэмулятор обучен и способен повторять динамику ОУ, происходит обучение НС, выполняющей функции регулятора.
Обучение регулятора происходит в режиме он-лайн. На вход нейрорегулятора на k-ом такте поступает желаемое положение ОУ на следующем (к+1)-м такте, при этом на выходе регулятора формируется управляющее воздействие u(k).После отработки воздействия u(k),ОУ переходит в состояние y(k+1),а нейроэмулятор выдает значение у(к+1). На основании этих сигналов, вычисляется ошибка регулирования e=y- у, которая по методу обратного распространения проходит через нейроэмулятор и нейрорегулятор. При этом, корректируются веса связей НС-регулятора, а веса нейроэмулятора не меняются, он лишь учитывается в качестве дополнительных слоев НС-регулятора [87, 93, 98].
Этот метод относится к инверсному нейроуправлению, так как механизм обратного распространения ошибки через прямой нейроэмулятор реализует
локальную инверсную модель в текущей точке пространства состояний объекта управления [98] .
Схема метода обратного пропуска ошибки через прямой нейроэмулятор представлена на рисунке 1.4: слева показана схема в процессе обучения прямого нейроэмулятора, справа - схема обучения нейроконтроллера.
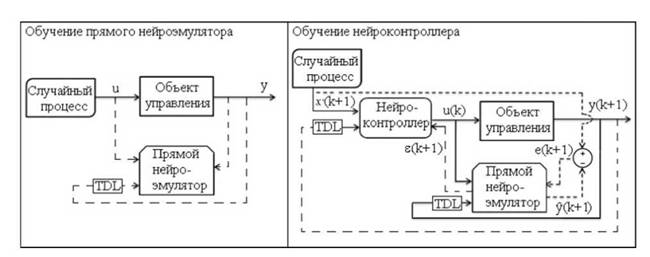
Рисунок 1.4 - Схема метода обратного пропуска ошибки через прямой нейроэмулятор
В качестве недостатка данного метода построения регулятора можно указать необходимость создания и обучения сразу двух нейронных сетей. К достоинству можно отнести лучшее качество управления, по сравнению с методами, рассмотренными ранее.
Прогнозирующее модельное нейроуправление. Методы обучения нейросетевых регуляторов, при которых минимизируется отклонение текущего выхода ОУ от входного воздействия, не всегда хорошо справляются в задачей регулирования. Во-первых, если переходный процесс длится дольше, чем один такт, то НС, стремясь минимизировать рассогласование, может выдать большое управляющее воздействие, что приведет к перерегуированию. Во-вторых, в таких системах всегда существует запаздывание из-за обратной связи, что ухудшает качество регулирования.
В связи с этим, был разработан метод прогнозирующего модельного нейроуправления, который минимизирует функционал стоимости интегральной ошибки, прогнозируемой на несколько тактов вперед. Схема метода показана на рисунке 1.5.

Рисунок 1.5 - Схема прогнозирующего модельного нейроуправления
Для прогнозирования будущего поведения ОУ и вычисления ошибок управления, используется прямой нейроэмулятор, обученный аналогично случаю обратного распространению ошибки через прямой нейроэмулятор (левая часть рисунка 1.4). Но отличие состоит в отсутствии обучаемого нейроконтроллера. Вместо него используется оптимизационный модуль, работающий в режиме реального времени.
На k-м такте оптимизационный модуль получает желаемую траекторию на несколько таков вперед. После этого, он подает на прямой нейроэмулятор различные управляющие воздействия и прогнозирует поведение ОУ и вычисляет наилучшую стратегию управления. В результате выбирается оптимальное управляющее воздействие, приводящее ОУ к нужному положению на целевой траектории.
Минусом данного метода является невозможность его применения в системах с высокой частотой дискретизации, т.к. оптимизационный алгоритм за один такт не будет успевать находить оптимальное управляющее воздействие.
Многомодульное нейроуправление на основе пар прямых и инверсных моделей. Многомодульные нейросистемы построены по принципу комитетов экспертов [100], т.е. состоят из отдельных модулей, каждый из которых решает свою отдельную подзадачу в общей задаче. Итоговое управляющее воздействие
складывается из совокупности управляющих значений отдельных модулей. Рссматриваемый метод предполагает формирование поведения системы в процессе обучения, и корректировку поведения нейронных модулей на каждом такте нейроуправления. В связи с этим, каждый нейросетевой модуль включает в себя два нейроэмулятора: прямой и обратный. Прямой нейроэмулятор проходит процесс обучения, идентиный рассмотренному по схеме, изображенной на рисунке 1.4 слева. Инверсный нейроэмулятор обучается по схеме, представленной на рисунке 1.3 слева.
Схема многомодульного управления на основе пар прямых и инверсных моделей представлена на рисунке 1.6.
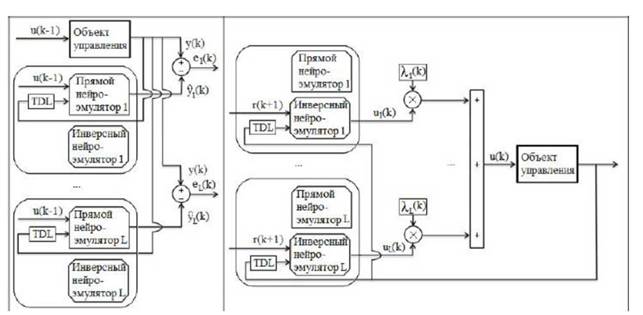
Рисунок 1.6 - Схема многомодульного управления на основе пар прямых и инверсных моделей
Функционирование системы на каждом такте состоит из двух этапов. Первым этапом работы является переоценка коэффициентов ответственности модулей, схема которого представлена на рисунке 1.6 слева. На входы прямых нейроэмуляторов каждого модуля поступает значения управляющего воздействия u(k-1)и состояния ОУ y(k-1)на предыдущем такте. По этим данным, каждый модуль производит свою оценку текущего положения ОУ, на основе которой
вычисляется ошибка предвидения, по которой впоследствии вычисляется коэффициент предвидения (ответственности).
На втором этапе происходит коллективное управление объектом, с использованием вычисленных коэффициентов ответственности.
Эту задачу выполняют инверсные нейроэмуляторы, работающие в режиме обобщенного инверсного нейроуправления. Результирующим воздействием на ОУ является взвешенная сумма управляющих воздействий всех модулей системы, вклад каждого из которых пропорционален коэффициенту предвидения.Подразумевается, что каждый модуль обучается на своем, существенно отличающемся от других, примере траектории состояний ОУ и специализируется именно на нем. В связи с этим, существенным недостатком многомодульного нейроуправления является трудность в составлении обущающих выборок для каждого нейроэмулятора всех модулей [87, 93, 98].
Гибридное нейроуправление. Гибридным нейроуправлением называют совместное функционирование нейросетевых регуляторов и стандартных регуляторов классичесской теории управления. Одним из видов гибридного нейроуправления является параллельное гибридное нейроуправление, схема которого представлена на рисунке 1.7.

Рисунок 1.7 - Схема параллельного гибридного нейроуправления
Существует несколько способов обучения и подключения нейросетевого регулятора к системе управления. Например, сначала контур управления объектом замыкается классическим регулятором. Далее, нейроконтроллер учится
управлять этой замкнутой системой, после чего он подключается к системе и управляющие воздействия нейросетевого и обычного регуляторов складываются. Либо в другом порядке: сначала контур управления замыкается нейросетевым регулятором, который проходит обучение. После этого настраивается обычный регулятор для управление этой системой. Настроенный регулятор подключается к системе и управляющие воздействия обоих регуляторов складываются.
Третьим вариантом параллельного гибридного нейроуправления является разграничение областей действия обычного регулятора и нейросетевого. В результате, на ОУ поступает управляющее воздействие либо от одного регулятора, либо от другого, в зависимости от положения объекта управления.
Параллельное гибридное нейроуправление является самым простым решением для перехода от обычных регуляторов к нейросетевым.
Другим методом гибридного нейроуправления является гибридное нейро- ПИД управление (или нейроморфное управление), сутью которого является самонастройка ПИД-регулятора с помощью искусственных нейронных сетей в режиме он-лайн.
Схема данного метода представлена на рисунке 1.8. На входе нейронная сеть получает уставку требуемого положения объекта и предыдущего его состояния. На выходе получаются коэффициенты управления ПИД- регулятора kp, ki, kd [87, 93, 98].
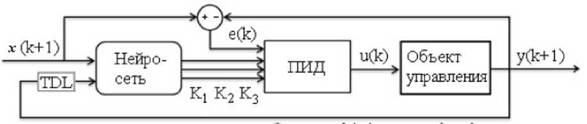
Рисунок 1.8 - Схема гибридного нейро-ПИД управления
Сгенерированные значения параметров вместе с текущей ошибкой управления поступают на ПИД-регулятор, который в свою очередь генерирует управляющее воздействие на объект управления.
Достоинством этого метода является то, что обычный ПИД-регулятор превращается в нелинейный, что обеспечивает более высокое качество управления нелинейными объектами [87, 93, 98].
Подводя итог вышесказанному, можно отметить что нейроуправление интенсивно развивается, разрабатывая все новые методы и структуры управления объектами.
1.3
Еще по теме Методы нейросетевого управления, используемые в биотехнических системах:
- Анализ и оценка состояния проблемы синтеза оптимального управления на базе нейросетевого подхода для биотехнических систем реабилитации
- Методы и средства нейросетевого управления для вертикализации экзоскелета
- Разработка генетических алгоритмов для синтеза систем управления вертикализацией экзоскелета посредством нейросетевых технологий
- Экзоскелеты в биотехнических системах реабилитации
- Выбор структурных решений для нейросетевого управления экзоскелетом
- Система управления персоналом. Принципы и методы ее построения.
- Оптимизационные методы и модели в управлении экономическими системами
- Обзор вычислительных методов, используемых при моделировании
- CMS система - Content Menegment System - Система управления содержимым или, проще говоря, система управления сайтом. Это еще у нас в России иногда называют движком сайта. Вещь полезная :)
- Синтез системы управления вертикализацией экзоскелета методом искусственных нейронных сетей
- 19. Научные методы, используемые в экономической географии.
- Вопрос 2 Методы исследования, используемые в этнопсихологии.
- Методы используемыми при формировании и развитии организационной культуры
- Разработка современных российских методов управления в контексте самоорганизации социальных систем Development of modern Russian methods of management in a context of self-organization of social systems
- 3. Методы, используемые для обращения к аудитории