Подвижные системы координат
Подвижные системы координат могут участвовать как во вращательном, так и в поступательном движениях относительно некоторой неподвижной инерциальной системы координат. На рис. 12.1 изображена подвижная система координат  , которая совершает вращательное и поступательное движения относительно инерциальной системы координат
, которая совершает вращательное и поступательное движения относительно инерциальной системы координат  .
.
 и задается векторами r и r* соответственно. Положение точки О* в системе координат определяется вектором h.
и задается векторами r и r* соответственно. Положение точки О* в системе координат определяется вектором h. 
Рисунок 12.1. Подвижная система координат
Соотношения между векторами r и r* даётся выражением (см. рис. 12.1):
 . (12-1)
. (12-1)
Если система координат движется относительно системы , то:
 , (12-2)
, (12-2)
где  и
и  - скорости точки р в системах координат и соответственно, а
- скорости точки р в системах координат и соответственно, а  - скорость точки 0* в системе координат
- скорость точки 0* в системе координат  .
.
С учетом равенства (11-13) выражение (12-2) представим:
 .
.
Аналогично ускорение точки р в системе координат :
 , (12-4)
, (12-4)
где 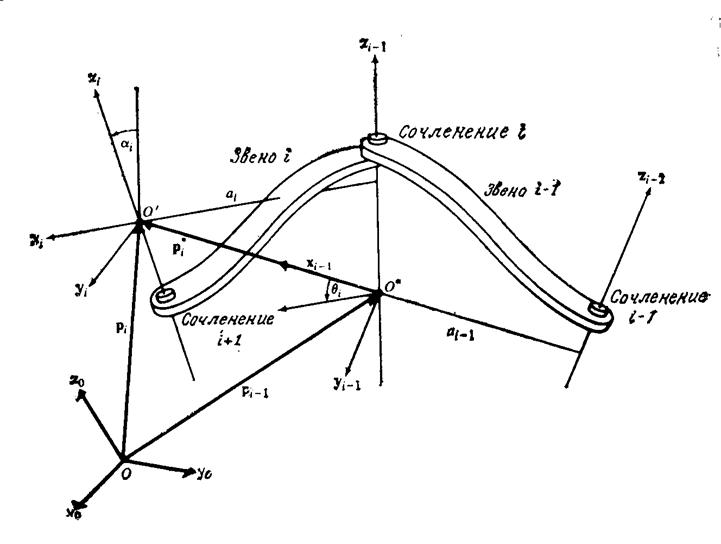 и
и  - ускорения точки р в системах координат и соответственно, а
- ускорения точки р в системах координат и соответственно, а  - ускорение системы координат в инерциальной системе координат .
- ускорение системы координат в инерциальной системе координат .
С учетом (11-14) равенство (12-4) можно представить в виде:
 . (12-5)
. (12-5)
Полученные соотношения для подвижных систем координат применима к системам координат звеньев манипулятора.
Еще по теме Подвижные системы координат:
- 2.1.2 Географічна система координат. Астрономічні координати. Геодезичні координати. Система прямокутних координат
- 2.1.1 Поняття про координати і системи координат, що застосовуються в артилерії
- Система координат.
- Цилиндрическая система координат.
- Сферическая система координат.
- § 38. Спеціальні системи координат
- Системы координат.
- Цилиндрическая и сферическая системы координат.
- Декартова система координат.
- 1.1.1. Наземные системы подвижной радиосвязи УКВ диапазона
- Полярная система координат.
- § 41. Ортогональні криволінійні системи координат
- Алгоритм формирования систем координат звеньев
- 2.2. Системы координат, применяемые в ракетных войсках и артиллерии
- Основные показатели систем подвижной радиосвязи