Уравнения Ньютона-Эйлера
В предыдущих лекциях с помощью уравнений Лагранжа-Эйлера мы получили систему нелинейных дифференциальных уравнений, описывающих динамику движения манипулятора. С вычислительной точки зрения применение этих уравнений представляет большие трудности при решении задачи в реальном времени.
Для обеспечения управления в реальном времени была разработана модель динамики движения манипулятора, не учитывающая кориолисовы и центробежные силы. При быстром движении манипулятора ошибки в реализуемых силах и моментах, обусловленные неучетом центробежных и кариолисовых сил, не удается компенсировать за счёт управления с обратной связью из-за слишком больших величин требуемых для этого корректирующих моментов.Для упрощения вычислений пользуются формулой Ньютона-Эйлера, в основе которых лежит второй закон Ньютона.
Для вывода этих уравнений обратимся к подвижной системе координат.
Вращающиеся системы координат

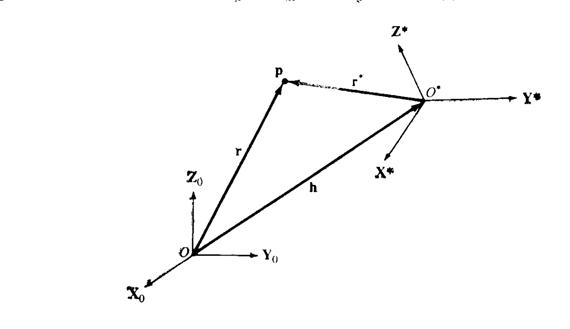
Рисунок 11.1. Вращающаяся система координат
Рассмотрим две системы координат (рис. 11.1):  - неподвижная инерционная система координат,
- неподвижная инерционная система координат,  - вращающаяся система координат. Начала этих координат совпадают и расположены в точке О, а оси
- вращающаяся система координат. Начала этих координат совпадают и расположены в точке О, а оси  ,
,  ,
,  вращаются относительно осей
вращаются относительно осей  ,
,  ,
,  .
.
Пусть  и
и  - тройки единичных векторов, направленных вдоль основных осей систем
- тройки единичных векторов, направленных вдоль основных осей систем  и
и  соответственно.
соответственно.
, можно описать следующими двумя способами:  , (11-1)
, (11-1)
 . (11-2)
. (11-2)
Найдём скорость точки r. Поскольку обе системы координат взаимно вращаются, скорость точки r(t) будут различны в этих системах. Примем, что  - скорость в неподвижной системе координат
- скорость в неподвижной системе координат  ; (11-3)
; (11-3)
 - скорость в подвижной вращающейся системе
- скорость в подвижной вращающейся системе
координат  . (11-4)
. (11-4)
Тогда из выражения (11-1) получаем скорость точки r(t) в системе координат :
 . (11-5)
. (11-5)
Дифференцируя равенство (11-2), получаем скорость точки r(t) в системе координат :
 .
.
(11-6)
С учетом равенств (11-2) и (11-6) получим следующее выражение для скорости точки r(t) в системе координат :
 .
.
(11-7)
Здесь трудно вычислить производные  , в связи с тем что векторы
, в связи с тем что векторы 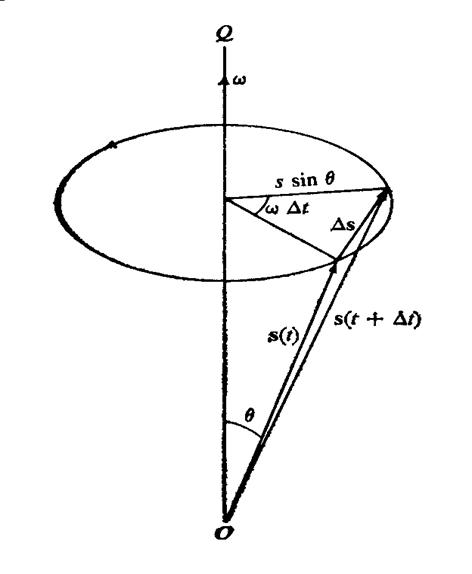 вращаются относительно векторов
вращаются относительно векторов  .
.
Чтобы найти соотношения между скоростями точки r в неподвижной и вращающейся системах координат, предположим, что система вращается вокруг некоторой оси OQ, проходящей через точку О с угловой скоростью  (рис.
(рис.
Угловая скорость вращения системы представляет собой по определению вектор длины , направленный вдоль оси OQ в соответствии с правилом правой руки.
Рисунок 11.2. Скорость во вращающейся системе координат
Скорость точки, положение которой задаётся вектором s в системе координат  равна:
равна:
 . (11-8)
. (11-8)
Поскольку производная вектора определяется равенством:
 , (11-9)
, (11-9)
справедливость выражения (7-8) можно доказать, убедившись, что:
 . (11-10)
. (11-10)
Поскольку равенство векторов обеспечивается совпадением их длин и направлений, векторы в левой и правой частях равенства (11-10) одинаковы по величине и их направления совпадают. Длина вектора  равна:
равна:
 . (11-11)
. (11-11)
Если величина  достаточно мала, то из рис. 11.2 очевидно, что:
достаточно мала, то из рис. 11.2 очевидно, что:
 . (11-12)
. (11-12)
Следовательно, длина векторов в левой и правой частях равенства (11-10) равны. В соответствии с определением векторного произведения вектор перпендикулярен вектору s и лежит в плоскости окружности (рис. 11.2).
Применив формулу (11-8) к единичным векторам из равенства (11-7), получаем:
 . (11-13)
. (11-13)
Это основное соотношение, определяющие связь между скоростями одной и той же точки во вращающейся и неподвижной системах координат. Продифференцировав левую и правую части равенства (11-13), получим:
 (11-14)
(11-14)
Равенство (11-14) представляет собой теорему Кориолиса. Первое слагаемое в правой части – ускорение точки в системе . Второе слагаемое описывает кориолисово ускорение. Третье слагаемое – центростремительное ускорение, направленное к оси вращения и перпендикулярное ей. Четвёртое слагаемое исчезает при постоянной угловой скорости.
Еще по теме Уравнения Ньютона-Эйлера:
- 3.2. Метод Ньютона для системы нелинейных уравнений
- 1.4.2. Определение. Вектор-функция , удовлетворяющая системе уравнений Эйлера-Пуассона, называется экстремалью функционала .
- 5. Метод Ньютона-Канторовича
- 7.3. Исправленный метод Эйлера.
- 7.3. Модифицированные методы Эйлера
- Метод Эйлера.
- 14. "Введение в анализ бесконечно малых" Эйлера
- Уравнения математической физики. Уравнения в частных производных.
- Метод Лагранжа-Эйлера
- Лабораторная работа № 6 Теорема Эйлера
- 7.2. Метод Эйлера
- 3. Уравнения, приводящие к уравнениям с разделяющимися переменными.
- Галилей и Ньютон
- 3.2.3 Метод Ньютона (касательных).
- Бином Ньютона. (полиномиальная формула)
- Галилей и Ньютон — гении механики
- Исаак Ньютон