4.2 Аппроксимативная оценка корреляционной функции
Наиболее распространенным на практике является способ, основанный на обеспечении минимума величины квадратической погрешности.
(4.3) 128
А = { [рм (т) -Px (т)]2 йт
ад
Величина погрешности А является функцией параметров модели P0,в,...,PN. Если величина А имеет один экстремум в заданном диапазоне изменения параметров P0,рх,..,PN и этот экстремум является минимум, то значения параметров модели могут быть определены из системы уравнений
5А. = 0
двт (4.4)
(m = 0,1,... , N)
Обеспечение одного экстремума (минимума) достигается выбором соответствующего вида модели и диапазона изменения ее параметров.
Подставляя в систему (4.4) величину А из уравнения (4.3), получим систему уравнений в следующем виде:
b^PT^^P^^ 0 {45)
(m = 0,1,.., N) Введем обозначение
= hM Т, в0, ft,.., PN ) = hm (Т); (4.6)
PM (Т)дРввТТdT = ym в PN ) = vm ¦ (4.7)
Тогда система уравнений (4.4) примет вид
(4.8)
j hm (T)PX (T)dT — Pm = 0
0
(m = 0,1,.., N)
rr (A n\ M[X(t) X(t — T)]
Поставив в выражение (4.7) pX (T) = —-— 2 —, после ряда
M[X (t)]
преобразований получим
X)
M[[X(t){j hm T) X(t — T)dT — VmX(t)}] = 0 (4
(m = 0,1,.., N)
Соотношение (4.8) может рассматривать как алгоритм для оценки аппроксимативным способом корреляционной функции. Такая аппаратура будет состоять из N+1 идентичных каналов. На рисунке 4.2 в качестве примера показана блок-схема m-го канала.
Этот канал включает в свой состав фильтр с регулируемыми параметрами A0, A,--, AN с импульсной характеристикой hm(г) (4.6), линейный преобразователь с коэффициентом преобразования (рт (4.7), функционально зависящим от параметров фильтра, вычитающее устройство (ВУ), множительное устройство (МУ), блок усреднения (БУ) и нуль - индикатор (НИ).Процесс оценки параметров модели корреляционной функции осуществляется так. При подаче на вход аппаратуры анализируемого
процесса X(t) на выходах блоков усреднения каналов будут действовать сигналы, являющиеся оценками левых частей соответствующих уравнений системы (4.8). Путем вариации параметров фильтров добиваются нулевых значений выходных сигналов блоков усреднения всех каналов. Полученные значения параметров принимаются в качестве оценок параметров корреляционной функции исследуемого процесса.
Различают два типа модели корреляционной функции. Один из типов моделей представляет ряд по той или иной системе функций. Ко второму типу относят модели, представляющие функции заданного вида.
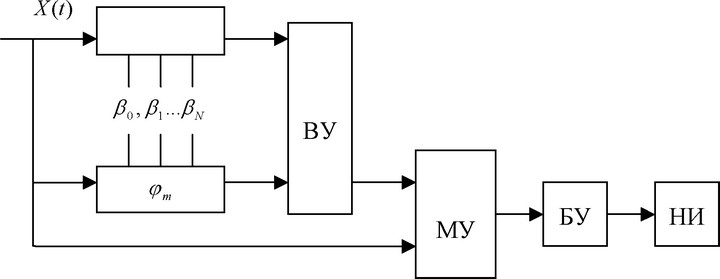
Рисунок 34 - Блок - схема устройства для оценки корреляционной функции по аппроксимативному способу
Последний тип характерен тем, что модель корреляционной функции является нелинейной функцией параметров A0, A, ., AN. Аппаратура, осуществляющая оценку параметров такой модели, имеет взаимосвязанные каналы, что при большом числе параметров приводит к существенному увеличению длительности анализа. Поэтому с целью повышения оперативности оценки параметров модели, представляющих собой функции заданного вида, целесообразно брать модели с небольшим числом параметров, не превышающем двух, трех.
Показано, что такого типа модели могут быть применены лишь тогда, когда достаточно априорной информации о корреляционных свойствах анализируемого процесса.
рмi(r) = expвг ;
Рм2(г) = exPг cos в1г;
Рм3 (г) = exp^г (cos вг + в sin в Ц) ;
Рм4 (г) = expвг (cos вг -в sin в |г|).
в1
Как конкретно проводится синтез аппаратуры, осуществляющей аппроксимацию корреляционной функции функцией заданного вида, рассмотрим на примере.
Пусть на основании каких-то соображений в качестве модели корреляционной функции выбрана следующая:
Рм 1 (г) = expвг . (4.10)
Эта модель содержит неизвестный параметр в0, который должен быть определен на основании критерия (4.3).
Для данной модели из соотношений (4.5) и (4.6) находим
И0(г) = -г exp~в01 г ,
1
^0 =
4в02
С учетом определенных величин система уравнений (4.9) для данного случая примет вид
ад 1
м[[X(tK-jTexpг X(t - г)ёг + —гX(t)}] = 0
или
ад
м[[X(t^^^exp'г X(t -г)ёг- X(t)}] = 0. (4.11)
0
На рисунке 35 представлена блок - схема аппаратуры для оценки параметра модели в0 синтезированная на основании (4.11).
Эта аппаратура состоит из двух одинаковых фильтров нижних частот с
передаточными функциями —2— с регулируемыми постоянными времени
(1 + ТР)
T = , вычитающего устройства (ВУ), множительного устройства (МУ),
(1 + ТР)
блока усреднения (БУ) и нуль - индикатора (НИ).
Заметим, что в данной аппаратуре отсутствует линейный преобразователь с регулируемым коэффициентом преобразования, что обусловлено видом модели. Процесс оценки вида параметра в0, может быть легко автоматизирован, если применить устройство, осуществляющее регулировку постоянных времени фильтров на входе в зависимости от величины выходного сигнала блока усреднения.Параметры других моделей корреляционных функций, приведенных выше, могут быть оценены аналогично.
Модели, представляющие собой ряды по той или иной системе функций, применяются тогда, когда имеется много априорных сведений о корреляционных свойствах анализируемого процесса. Эта модель имеет вид
ад
Рм (г) = ^вк^к (г). (4.12)
K=0

Рисунок 35 - Блок - схема аппаратуры для оценки параметра модели (4.11) корреляционной функции процесса.
Характерной ее особенностью является линейная зависимость от параметров в0,Д,-в.
Наиболее просто осуществлять оценку параметров модели (4.12) можно, если в качестве функции щк (г) выбрать ортогональные, удовлетворяющие условию
(4.13)
0, k Ф m Ят, k =m
В этом случае выражения (4.6), (4.7) примут вид
hm (г) = Wm (г), (4.14)
Pm =KPm , (4.15)
а система уравнений (4.9) преобразуется к виду
ад
м[[X(t){jVm (г) X(t - г)йг - Хпрп X(t)}] = 0 (m = 0,1,.., N)
Каждое из уравнений этой системы является линейным уравнением с одним неизвестным. В результате решения получим
1 ад
Am =—Г м [ X (t )jVm (г) X (t -г)! (4.17)
Если анализируемый процесс X (t) предварительно пронормирован по дисперсии то формула (4.17) примет вид
ад
вт =—м[Хн (t)jVm (г) XH (t-г^г], (4.18)
ДП 0
где Хн (t) = Х(t)/ С .
Блок - схема аппаратуры, реализующей алгоритм (4.18), показана на рисунке 36.
Аппаратура состоит из нормализатора (Н), фильтра с импульсной переходной характеристикой y/m (г), множительного устройства (МУ), блокаусреднения (БУ) и масштабирующего преобразователя с коэффициентом передачи —. Заметим, что если из состава аппаратуры исключить
Дп
нормализатор, то будет осуществляться оценка параметров модели ненормализованной корреляционной функции Rx (г). На рисунке 4.4 показана лишь один из каналов. Всего таких каналов должно быть N+1. Основным элементом каждого канала, определяющим сложность аппаратуры в целом, является фильтр с импульсной характеристикой y/m (г).

л
Рисунок 36 - Блок - схема аппаратуры, реализующей алгоритм (4.18)
X (t) 1 w вДля того, чтобы реализовать фильтр с такой импульсной характеристикой, должно быть выполнено условие jVm (z)dz< m. Это условие необходимо иметь в виду при выборе системы ортогональных функций. Кроме того, для простоты технической реализации аппаратуры желательно выбирать такую систему ортогональных функций, которая приводила бы к канонической структуре фильтров, когда в составе аппаратуры используется лишь один фильтр с импульсной характеристикой y/N (т). Остальные же фильтры оказываются составными частями указанного фильтра. Для получения канонической структуры фильтров должно быть выполнено условие m+ДО = Wm (t -т)уп (T)dT, (4.19) 0 где (pm (т) - импульсная характеристика элементарного звена фильтра. Если выбранная система ортогональных функций удовлетворяет условию (4.19) , то блок - схема аппаратуры для оценки параметров модели будет иметь вид, показанный на рисунке 4.5. Не поясняя состава блоков аппаратуры, который понятен из рисунка, скажем лишь, что она включает в состав один фильтр с импульсной характеристикой у/0(т) и N одинаковых фильтров с импульсными характеристиками ср(т). Широкое применение для оперативного анализа корреляционных функций получили модели, представляющие собой ряды по системе ортогональных функций Лагерра (у/п (т) = L(T)). ат п 1 Lm(т) = exp 2 ?(-1)пС1~(ат)\ (4.20) q=0 П! Для этих функций условие (4.13) имеет вид W. j Lm (т)Lk (т?т ' 0, k Ф п 1 , (4.21) —, k = m а
^0 (t) к- Wx(t)
W
1 1 1
X 0 X XN
I 1 Л Л P1 Pn Рисунок 37- Блок - схема аппаратуры для оценки параметров модели корреляционной функции (канонического вида) а параметры модели, как следует из (4.18) определяются по формуле адад Pm = щХ($)\аЬя (г) Х (t-г)ёг] = aj Rx (г)^ Ц. (4.22) 00 Применение модели для аппроксимативной оценки корреляционных функций позволяет просто реализовать аппаратуру, во - первых, благодаря тому, что выполняется условие (4.13), что приводит к канонической структуре фильтров, а во - вторых, в следствии того, что элементарная ячейка такого фильтра представляет собой простейшее звено с передаточной функцией первого порядка а 2 а Р+1 Погрешность аппроксимации корреляционной функции при использовании функции Лагерра, как это следует из выражений (4.3), (4.20) и (4.21), равна N A = J Rx (T)dz-- ZPl. (4.23) а m=0 Отсюда видно, что при прочих равных условиях величина погрешности аппроксимации А зависит от величины параметра а функции Лагерра. Принимая во внимание формулы (4.20) и (4.22), можно показать, что при а=0 и при а=да величина А=да, т.е. Найдем это оптимальное значение. Рассматривая А как функцию а, получим следующее условие минимума величины А: = 0 (4.24) да а > о да2 Из уравнения (4.23) находим дА 1 N 2 N дв ^ = ZP2m--ZPm да. (4.25) да а m=o а m=o да Из выражений (4.22) и (4.20) имеем dPm m Pm-1+F Pm + rn^ P„+1 ¦ (*2S) да 2а m 1 2а m 2а дP Подставив —— из уравнения (4.26) в уравнение (4.25), получим да дА N +1 //I Т7\ — PN + PN+1 . (427) да а Отсюда видно, что оптимальное значение параметра а должно находиться из уравнения PN+1 = 0. (4.28) При этом должно быть выбрано такое решение уравнения, при котором д2А > 0. Последнее условие с учетом (4.26) - (4.28), примет вид да 2 (N + 1)PN > (N + 2)PN+2. (4.29) В техническом аспекте задача выбора оптимального значения параметра функции Лагерра сводится к оптимальной подстройке постоянной времени фильтра Лагерра. Эта подстройка должна осуществляться в соответствии с алгоритмами (4.28), (4.29). При аппроксимации корреляционной функции могут быть использованы и другие системы корреляционных функций. Достаточно подробно рассмотренные вопросы, связанные с аппроксимацией корреляционных функций функциями Лагерра, дают представление, с какого типа задачами приходиться сталкиваться при использовании для анализа любой другой системы ортогональных функций.



Еще по теме 4.2 Аппроксимативная оценка корреляционной функции:
- 4.3 Оценка моментов корреляционной функции
- 4.1 Непосредственная оценка корреляционной функции
- 6.3 Аппроксимативные способы оценки плотности вероятности
- Методы оценки корреляционных характеристик
- 4 Методы оценки корреляционных характеристик
- В этой главе рассматриваются периодические взаимно-корреляционные функции двоичных последовательностей
- в главе проводится анализ влияния взаимного расположения НКА и созвездия НС, участвующего в сеансе навигационных определений, на корреляционные характеристики навигационных векторов, поступающих из НП. Проводится анализ влияния на точность навигационной оценки использования ковариационных матриц в диагональном виде без учета корреляционных характеристик ошибок векторов навигационных измерений. Показано, что существует резерв в повышении точности навигационных оценок на коротких интервалах про
- 6. Корреляционные исследования: их основные виды, достоинства и ограничения. Почему корреляционные исследования так популярны?
- 6.1 Непосредственный способ оценки функции распределения
- 6.3.1 Аппроксимативное оценивание плотности вероятности по критерию моментов
- 5.2. Функции природы и их экономическая оценка
- 6.3.2 Аппроксимативное оценивание плотности распределения по методу производных