Численное моделирование
В данном разделе монографии представлены результаты проверки предлагаемой методики с помощью численного моделирования [111]. Полученные с помощью предлагаемой методики результаты сравниваются с имеющимся аналитическим решением для линейной упругой системы.
В силу сложности рассматриваемой проблемы, до сих пор не было получено какого-либо аналитического решения задачи для простейшего однозвенного упругого манипулятора. Существует аналитическое решение для линейной одномассовой упругой системы с одной степенью свободы [380]. Такая упругая система изображена на рис.3.5. Положение упругой массы р определяется в виде суммы управляемой координаты х и упругого перемещения е. Привод расположен в поступательной кинематической паре.
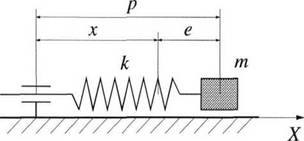
Рис. 3.5. Одномассовая упругая система
Уравнение кинематики такой системы имеет вид

а уравнение движения линейной упругой системы вид

Уравнение отслеживаемой траектории задано функцией Аналитическое решение
Аналитическое решение
обратной задачи кинематики подобной линейной системы находится в следующей форме

Как уже было замечено в разделе 3.3, из выражения (3.71) вытекает условие непрерывности во времени четвертой производной заданной траектории pjυ(∕) по времени. Для проверки системы были выбраны следующие параметры системы: масса m= 1 кг; жесткость пружины k = 100 Н/м; Траектория была задана функцией

Для простейшей модели с указанными параметрами по предлагаемой методике были получены 2 решения обратной задачи кинематики с различными временными шагами Δ/ (Δ T1= 0,01 c., Δ∕2= 0.001 с.). Решение, полученное с помощью данной методики, сравниваются с аналитическим решением на рис.
с 4.6 - 4.8. На рис.3.6 представлены графики изменения координаты массы во времени для каждого временного шага, на рис.3.7 - скорости массы, на рис.3.8 — ускорения. На левой части каждого рисунка представлены результаты, полученные при ∆z = 0.01 с., на правой части — при ∆t = 0.001 с.Видно, что при уменьшении временного шага, получаемое с помощью данной методики решение стремится к аналитическому решению, а в данном случае ΔZ = 0.001 с. почти совпадает с ним.
Необходимо заметить, что при данной линейной модели нет нижнего ограничения на величину временного шага ∆t>∆∕min, что позволило получить близкое к аналитическому численное решение. Тем не менее, скорость сходимости быстро уменьшается при уменьшении ∆t. Для увеличения скорости сходимости в данной линейной модели может использоваться безразмерный коэффициент ηc> 1 (в рас- 176
смотренном примере ηc = 5 ÷ 40) в выражении (3.56), а именно

Приведенный небольшой пример показывает, что в линейной постановке численная методика решения обратной задачи кинематики очень эффективна и дает точное решение при Δ/ -> 0.
Еще по теме Численное моделирование:
- Численное моделирование
- 3.5.1 Описание допущений, принимаемых при численном моделировании
- Численное моделирование динамики нелинейных упругих стержневых систем с переменными инерционными и жесткостными параметрами
- Численное и экспериментальное моделирование методики решения обратной задачи кинематики на пространственном упругом манипуляторе
- 3.5.4 Численное моделирование при совместных ошибках модели поля Земли и ошибках баллистического коэффициента
- Рост, численности.
- Численность.
- Тема 6 Численное интегрирование
- 2.2. Нормативы потерь рабочего времени и численности персонала.
- Индекс численности рабочей силы
- Численное решение.
- 5. Динамика численности
- Абсолютная численность населения.
- Динамика численности популяций и ее регуляция
- 8.6.3. Типы динамики численности популяций
- Методы численного интегрирования нелинейных уравнений движения
- 1.2. Интерполяция и численное дифференцирование
- Среднесписочная численность работников