2. Модель активной системы и общая постановка задачи управления
K(u)= Ф(u,F(u)) называется эффективностью управления u e U. Тогда задача управляющего органа заключается в выборе такого допустимого управления, которое максимизировало бы значение его эффективности при условии, что известна реакция системы F(u) на управляющие воздействия :
K(u) ® max .
ueU
Рассмотрим теперь различия в моделях управления пассивными и активными системами. Для пассивной (технической, формальной и т. д.) системы зависимость y = F(u) является, фактически, моделью системы - управляемого объекта, отражающей законы и ограничения ее функционирования. Например, для динамической системы эта зависимость может являться решением системы дифференциальных уравнений, для некоторого черного ящика - быть результатом экспериментов и т.д. Общим для всех пассивных систем является их "детерминизм" с точки зрения управления - не в смысле отсутствия неопределенности, а в смысле отсутствия у управляемого объекта свободы выбора своего состояния и возможности прогнозирования поведения управляющего органа.
Иначе обстоит дело в активных системах, то есть системах, в которых управляемые субъекты (точнее говоря, хотя бы один субъект) обладают свойством активности - в том числе - свободой выбора своего состояния. Помимо возможности выбора своего состояния, элементы АС обладают собственными интересами и предпочтениями, то есть осуществляют выбор состояния целенаправленно (в противном случае их поведение можно было бы рассматривать как пассивное). Соответственно конкретизируется и модель системы F(), которая должна учитывать проявления активности управляемых субъектов.
Проявления эти описываются следующим образом - считается, что управляемые субъектыстремятся к выбору таких своих состояний, которые являются наилучшими с точки зрения их предпочтений при заданных управляющих воздействиях, а управляющие воздействия, в свою очередь, зависят от состояний управляемых субъектов (см. игру Г2 ниже). Одним из важнейших проявлений активности также является способность управляемых субъектов «предсказывать» (в рамках имеющейся информации) поведение управляющего органа - его реакцию на состояние системы и т. д.
Если управляющий орган имеет модель реальной активной системы, которая адекватно описывает ее поведение3, то задача управления АС (задача синтеза оптимального управляющего воздействия) сводится к сформулированной выше - выбрать оптимальное управление u = u (y) e U, то есть допустимое управление, максимизирующее эффективность.
Закончив краткое качественное обсуждение постановки задачи управления в пассивных и активных системах, перейдем к более детальному описанию собственно модели активной системы.
Любая конкретная активная система (и ее модель) задается перечислением следующих параметров.
Состав АС - совокупность субъектов и объектов, являющихся элементами системы (в дальнейшем для их обозначения будет использоваться термин "участники" АС).
Структура АС - совокупность информационных, управляющих и других связей между участниками АС, включая отношения подчиненности и разделение прав принятия решений. В большинстве моделей теории активных систем исследовались двухуровневые АС веерного типа, состоящие из одного управляющего органа - центра на верхнем уровне иерархии и одного или нескольких подчиненных ему управляемых субъектов - активных элементов (АЭ) на нижнем уровне.
Число периодов функционирования отражает наличие или отсутствие динамики (однократности или многократности выбора стратегий участниками АС в течение рассматриваемого периода времени).
Целевые функции участников системы, отражающие их интересы и предпочтения .
В формальных моделях ТАС считается, что рациональному поведению участников соответствует выбор состояний (стратегий), которые максимизировали бы их целевые функции (см. теоретико-игровые модели ниже).Допустимые множества состояний (стратегий) участников АС, отражающие индивидуальные и общие для всех ограничения на выбор состояний, накладываемые окружающей средой, используемой технологией и т. д.
Порядок функционирования - последовательность получения информации и выбора стратегий участниками АС.
Информированность участников - та информация, которой обладают участники АС на момент принятия решений о выбираемых стратегиях.
Состав, структура, целевые функции, допустимые множества, число периодов функционирования, порядок функционирования и информированность участников определяют механизм функционирования (управления) АС в широком смысле - совокупность законов, правил и процедур взаимодействия участников системы. В узком смысле механизм управления представляет собой совокупность правил принятия решений (ППР) участниками АС при заданных ее составе, структуре и т. д. (например, ППР центра - зависимость u (y), ставящая соответствие состояниям АЭ конкретное значение управляющего воздействия).
Умея решать задачу синтеза механизма управления в узком смысле, можно решать задачи синтеза оптимального состава участников АС, ее структуры и т.д., то есть задачи синтеза механизма управления в широком смысле.
Рассмотрим базовую модель активной системы, состоящей из центра и n активных элементов, функционирующих в условиях полной информированности обо всех существенных внешних и внутренних по отношению к системе параметрах (детерминированная АС). Структура АС приведена на рисунке 1.
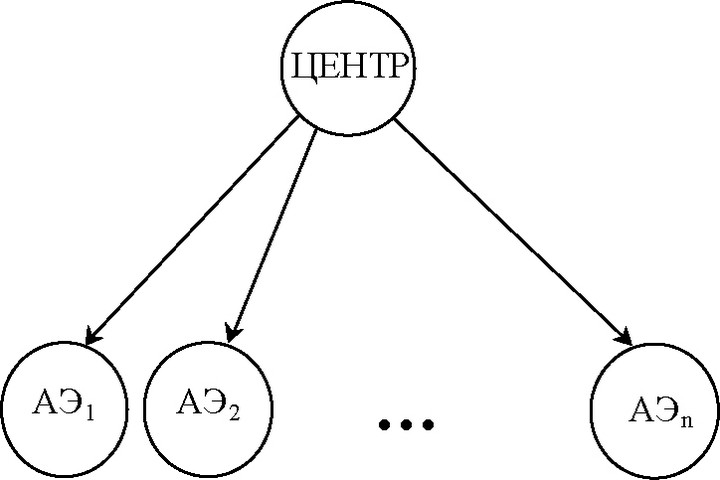
Рис.1. Двухуровневая АС веерного типа.
Термин "базовая" по отношению к описываемой модели несет следующую нагрузку: рассматриваемая модель является с одной стороны простейшей (как с точки зрения структуры, описания и т.д., так и с точки зрения ее исследования), так как в ее рамках не учитываются многие факторы (динамика, неопределенность и т.д., которые учитываются в расширениях базовой модели), а с другой стороны на ее примере можно проследить многие закономерности управления АС с тем, чтобы использовать их при переходе к более сложным моделям. Кроме того, следует отметить, что нами был избран индуктивный стиль изложения материала настоящего «предисловия», соответствующий историческому подходу к описанию результатов ТАС; переход от базовой модели к ее расширениям обсуждается ниже.
Альтернативой является дедуктивный подход - рассмотрение максимально подробной модели АС, учитывающей все возможные постановки задачуправления, и дальнейшая конкретизация ее для тех или иных частных случаев. Недостаток последнего подхода очевиден - при его использовании исходное описание было бы перегружено деталями, которые можно рассматривать по отдельности (что и делается ниже), и затрудняло бы понимание качественных, но чрезвычайно важных, аспектов управления в активных системах.
Теоретико-игровая формулировка задачи управления
n
заключается в следующем. Пусть y = (yh y2, yn) e A = П A, -
i=1
вектор действий активных элементов, компоненты которых они могут выбирать независимо (гипотеза независимого поведения (ГНП)). Если ГНП не выполнена, то есть существуют общие (глобальные) ограничения на выбираемые АЭ состояния, то сначала решают задачу управления в рамках ГНП, а затем исследуют реализуемость состояний с точки зрения глобальных ограничений. Так, например, для согласованных механизмов управления (обеспечивающих совпадение состояний АЭ с плановыми значениями - планом называется желательное с точки зрения центра состояние АЭ) достаточно чтобы глобальным ограничениям удовлетворяли только планы. Альтернативой (часто используемой в теории игр с непротивоположными интересами [276, 336]) является наложение на АЭ бесконечных штрафов в случае нарушения глобальных ограничений.
Предположим, что целевая функция i-го АЭ f(y,u), отражает его предпочтения на множестве AxU. Определим P(u) - множество решений игры АЭ (множество реализуемых действий) как множество равновесных при заданном управлении u e U стратегий АЭ. В одноэлементной АС P(u) является множеством точек максимума целевой функции АЭ, в многоэлементных системах - множество равновесий (в максиминнных стратегиях, или доминантных стратегиях, или равновесий Нэша, Байеса, Штакельберга и т.д. - в зависимости от конкретной задачи). Множество решений игры отражает предположения центра (исследователя операций) о поведении управляемых субъектов (активных элементов) при заданном управлении.
Далее, центр, интересы которого идентифицируются с интересами АС в целом и на позициях которого находится исследователь операций (см. 12обсуждение этого предположения в [84, 195, 276]), должен конкретизировать свои предположения о стратегиях, выбираемых элементами из множества решений игры. Наиболее часто применяются два "предельных" подхода - метод максимального гарантированного результата (МГР), при использовании которого центр рассчитывает на наихудший для него выбор АЭ, и гипотеза благожелательности (ГБ), в рамках которой АЭ выбирают из множества решений игры наиболее предпочтительные с точки зрения центра действия. Далее по умолчанию будем считать выполненной гипотезу благожелательности. При этом задача управления АС заключается в поиске допустимого управления, максимизирующего целевую функцию центра:
u e Arg max max F(u,y),
ueU y eP(u)
то есть управления, имеющего максимальную эффективность
K(u)= max F(u,y) (или максимальную гарантированную
y eP( u)
эффективность Kg(u) = min F(u,y)).
y eP(u)
Отметим, что приведенная теоретико-игровая формулировка задачи управления АС, в которой центр является метаигроком, обладающим правилом первого хода и имеющим возможность назначать свою стратегию, которая зависит от стратегий АЭ: u=u (y), является игрой типа Г2 в терминологии теории иерархических игр [276]. Зависимость u () называется механизмом управления в узком смысле (см. определение выше). Два важных частных случая общей постановки составляют задачи стимулирования и задачи планирования.
Содержательно, в задаче стимулирования стратегией центра является выбор системы (механизма) стимулирования (набора функций стимулирования) s(y) = (ofy)}, ставящих в соответствие
действиям АЭ величины вознаграждений, получаемых от центра, то есть u = s(y). Задачей синтеза оптимальной функции стимулирования называется задача поиска допустимой системы стимулирования, имеющей максимальную эффективность. При их изучении основной акцент делается на исследовании влияния параметров АС и ограничений механизма стимулирования на множество решений игры, которое в задачах стимулирования называется множеством реализуемых действий.
В задаче планирования стратегией центра является выбор множества возможных сообщений АЭ и механизма (процедуры) планирования, ставящей в соответствие сообщениям элементов центру о неизвестных ему существенных параметрах назначаемый АЭ вектор планов.
При их изучении основной акцент, помимо анализа эффективности, делается на исследовании выгодности для АЭ сообщения центру достоверной информации - так называемая проблема манипулируемости. В более узком значении термин "задача планирования" используется в задачах стимулирования, когда на втором шаге ее решения (см. ниже) при известных множествах реализуемых действий решается задача оптимального согласованного планирования (ОСП), то есть задача выбора конкретного действия АЭ, которое центру наиболее выгодно реализовать.Закончив краткое описание базовой модели, перейдем к классификации задач управления АС.
Еще по теме 2. Модель активной системы и общая постановка задачи управления:
- Общая постановка задачи и модель процесса научения.
- 3. Классификация задач управления активными системами
- Постановка задачи и определение типа модели.
- 2.1 Постановка и математическая модель задачи
- §9, Постановка задачи. Используемые модели
- 2.1. Постановка задачи оптимального управления
- 1.4. Постановка задач управления службой скорой медицинской помощи
- 7. Дискретные модели активных систем
- Общая постановка задачи нелинейного программирования. Необходимые условия для максимума функции на положительном ортанте.
- 8. Базовые механизмы управления активными системами
- 8.5. Проектирование функциональной модели.Матрица разделения административных задач управления (РАЗУ)
- Нормативные модели систем государственного и муниципального управления