Автоматические системы управления
Автоматические системы – устройства, в которых осуществляется целенаправленное действие в соответствии с вводимой в них информацией без активного вмешательства оператора.
Параметр технологического процесса – физическая величина, например: температура, давление, расход, уровень, объем, масса, рН, напряжение и т.д.
Автоматические системы делятся на:
1. системы без обратной связи (циклические, программные, разомкнутые системы). Выполняют свои функции жесткого управления по заранее заданной программе, предусматривающей характер и порядок воздействия на объект регулирования. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в системе модели управляемого объекта. (рис ….)
2. системы с обратной связью (ациклические, информационные, замкнутые) управляющее воздействие формируют в непосредственной зависимости от управляемой величины. Связь выхода системы с его входом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной. (рис ….)
Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления и управляющего устройства.
Объект управления или объект регулирования – устройство, требуемый режим работы которого должен поддерживаться извне специально организованными управляющими воздействиями, обеспечивающие изменение состояния объекта в соответствии с заданным законом управления. Такое изменение происходит в результате внешних факторов, например, вследствие управляющих или возмущающих воздействий.
Системы автоматического регулирования (САР) могут быть представлены:
Системой автоматической стабилизации (Выходное значение поддерживается на постоянном уровне отклонения возникают за счёт возмущений и при включении) служат для поддержания в заданных пределах или на постоянном уровне некоторого регулируемого параметра (стабилизирующие САР).
Главное назначение систем автоматической стабилизации – компенсация внешних возмущающих воздействий.O Системой программного регулирования (Заданное значение изменяется по заранее заданному программному закону, наряду с ошибками, встречающимися в системах автоматического регулирования, здесь также имеют место ошибки от инерционности регулятора).
O Следящей системой (Входное воздействие неизвестно, оно определяется только в процессе функционирования системы, а ошибки очень сильно зависят от вида функции) служат либо для обеспечения протекания производственного процесса по заданному заранее или в зависимости от определенных условий закону (следящие САР).
САР с обратной связью, включая в состав объект и регулятор, сочетают контроль какого-либо параметра «Х», называемого регулируемым и характеризующего протекающий в регулируемом объекте процесс, с решением задачи регулирования путем сравнения регулируемого параметра с заданным воздействием «Y» на этот процесс (объект) в нужном направлении.

Рис. … Незамкнутая циклическая программная система автоматического
регулирования

Рис. …. Упрощённый вид контура САР с обратной связью.
Дополнительная связь в структурной схеме САР, направленная от выхода к входу, называется обратной связью (ОС). Обратная связь может быть отрицательной или положительной.
Регулируемым параметром называется параметр технологического процесса, который необходимо поддерживать постоянным, или изменять по заданной программе, или изменять по определенному закону.
Значение регулируемой величины в рассматриваемый момент времени называется мгновенным значением.
Значение регулируемой величины, полученное в рассматриваемый момент времени на основании данных некоторого измерительного прибора называется ее измеренным значением.
Измеряемый и (или) регулируемый параметр технологического процесса может преобразовываться первичным прибором (датчиком) в какой-либо унифицированный сигнал.
Если датчик выдает неунифицированный сигнал (например, термопары, термопреобразователи сопротивления, тензодатчики и др.), то для приведения его к стандартному диапазону должен быть установлен соответствующий нормализатор (преобразователь) сигналов. (Также можно использовать измерители-регуляторы с универсальным входом, которые поддерживают подключение большинства наиболее распространенных типов первичных приборов (датчиков) без использования нормализаторов сигналов).
Задача регулирования – доведение выходной величины X обьекта регулирования до заранее определенного значения SP и удержания ее на данном значении с учетом влияния возмущающих воздействий (Z).
Задающее воздействие (SP – Set Point Value, W, Wx, Wv) – воздействие на систему, определяющее требуемый закон изменения регулируемой величины.
Возмущающее воздействие (Z) – воздействие, стремящееся нарушить функциональную связь между задающим воздействием и регулируемой величиной.
Выходное воздействие (Y) – воздействие, выдаваемое на выходе системы управления или устройства регулирования.
На рис…. входное воздействие подаваемое на вход системы или устройства управления указано как X или PV=X, где PV – Process Variable – переменная процесса. Управляющее воpдействие Y вырабатывается в результате сравнения истинного значения (PV=X) с заданным значением SP.
Рассогласование регулирования (E = SP - PV = SP - X) – разность между заданным (SP) и действительным (PV) значением регулируемой величины (рис. … а).
Отклонение регулирования (E = PV-SP = X - SP) – разность между действительным (PV) значением и заданным (SP) значением регулируемой величины (рис. … б).

Рис. ... Регулирование по рассогласованию - а) и регулирование по отклонению - б)
Картина процесса регулирования представлена графиком на котором представлен процесс достижения заданной величины и поддержание её значения на заданном уровне.
Рис. … Характеристика статического регулирования
При статическом регулировании регулируемая величина (например, температура), находящаяся под влиянием различных внешних воздействий (подача напряжения на ТЭН или подача охлаждающей жидкости) на регулируемый объект по окончании переходного процесса, принимает неодинаковые значения, зависящие от величины воздействия.
Характерные особенности статической системы регулирования следующие: равновесие системы возможно при различных значениях регулируемой величины; каждому значению регулируемой величины соответствует определенное положение регулирующего органа.
Рис. … Характеристика астатического регулирования
При астатическом регулировании нет определенной связи между положением регулирующего органа и установившимся значением регулируемой величины. При астатическом регулировании при различных по величине значениях внешнего возмущающего воздействия (нагрузки) на объект по окончании переходного процесса восстанавливается значение регулируемой величины.
Характерные особенности астатической системы регулирования следующие: равновесие системы возможно только при единственном значении регулируемой величины (например, уровня), причем это значение. равно заданному; регулирующий орган (например, клапан, заслонка) должен иметь возможность занимать различные положения при неизменном значении регулируемой величины.
У астатических регуляторов отсутствует статическая ошибка и регулируемая величина остается равной заданной с точностью, соответствующей нечувствительности регулятора для всех равновесных состояний системы.
Если на вход объекта подается несколько входных воздействий (или возмущений), то реакция объекта на сумму входных воздействий равна сумме реакций объекта на каждое воздействие в отдельности.
Подавляющее большинство систем построено по принципу обратной связи - регулирования по рассогласованию или регулирования по отклонению – см.
рис.15.
|
|
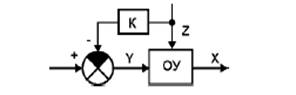
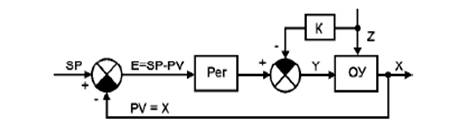
Рис. 16. Регулирование а) - по возмущению (где К - усилитель с коэффициентом усиления К) и регулирование по рассогласованию и возмущению (б)
Принцип регулирования по возмущению (принцип компенсации) – см. рис. … а). Комбинированный принцип регулирования по рассогласованию и возмущению – см. рис. … б). Комбинированный принцип регулирования (см. рис. …) сочетает в себе особенности принципов регулирования по рассогласованию (отклонению) и возмущению. Этот способ достигает высокого качества управления.
Рис. ... Развёрнутое представление контура автоматического регулирование
Ограничения применения комбинированного принципа регулирования
не всегда можно измерить возмущающий фактор Z, не всегда можно экспериментально определить степень воздействия, не всегда можно составить математическую модель объекта управления, не всегда представляется возможным установить датчик (или очень дорого).
Расширенная схема контура регулирования по произвольному параметру приведена на рис. … .
Элементы, обведенные контурной линией могут частично отсутствовать или быть выполнены в качестве единых устройств. При сравнении сигналов SP и Х2 возникает сигнал рассогласования, который может быть равен 0 и тогда вся система остается неподвижной, либо вырабатывать отрицательный или положительный сигнал рассогласования, которые будут определять реакцию регулятора.
Еще по теме Автоматические системы управления:
- Лекция № 1. Общие сведения о системах автоматического управления и регулирования. Основные принципы управления.
- Автоматическое регулирование в системах кондиционирования воздуха
- CMS система - Content Menegment System - Система управления содержимым или, проще говоря, система управления сайтом. Это еще у нас в России иногда называют движком сайта. Вещь полезная :)
- Финансовый менеджмент как система управления. Субъекты и объекты управления.
- Финансовый менеджмент как система управления. Место и роль финансового менеджмента в общей системе управления предприятием
- 67. Система управления — совокупность взаимосвязанных элементов, способ реализации технологии управления, предполагающий воздействие на объект с целью изменения его состояния и процессных характеристик.
- 12. синтаксический уровень языковой системы. Трудные случаи именного и глагольного управления. Управленния при однородных членах предложения. Нанизованиия падежей
- 12. Социалистические преобразования и ликвидация системы нэпа. Утверждение административно-командной системы управления тоталитарного типа.
- Совершенствование системы управления и государственное регулирование транспортной системы в условиях рыночной экономики
- Тема 4. Автоматическое доказательство теорем