Прямая задача кинематики
Для систематического и обобщённого подхода к описанию и представлению расположения звеньев манипулятора (исполнительных механизмов робота) относительно заданной абсолютной системы координат применяют матричную и векторную алгебру.
Звенья манипулятора могут совершать вращательное и/или поступательное движение относительно абсолютной системы координат, оси которой параллельны осям сочленений звеньев. Прямая задача кинематики сводится к определению матрицы преобразования, устанавливающей связь между абсолютной и связанной системами координат. Для описания вращательного движения связанной системы отсчёта относительно абсолютной используется матрица поворота (вращения) размерностью 3´3. Для поступательного движения используется матрица однородного преобразования размерностью 4´4.
Матрицы поворота (вращения).
Матрицу поворота размерностью 3´3 можно определить как матрицу преобразования трёхмерного вектора положения в евклидовом пространстве, переводящую его из повернутой (связанной) системы отсчёта OUVW в абсолютную систему координат OXYZ. На рис.2.2 показаны две правые прямоугольные системы координат: система координат OXYZ с осями OX, OY, OZ и система OUVW с осями OU, OV, OW. Начала этих систем совпадают и расположены в точке О.
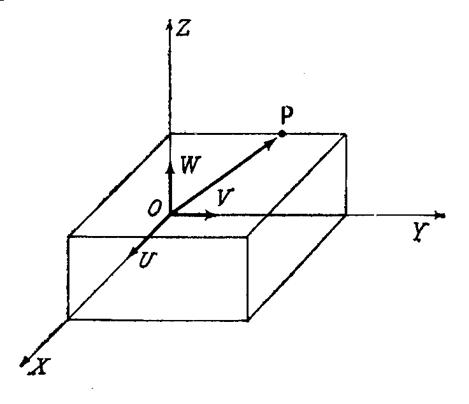
Рисунок 2.2. Абсолютная и связанная системы координат
Система OXYZ фиксирована в трёхмерном пространстве и принята за абсолютную. Система координат OUVW вращается относительно абсолютной и физически рассматривается как связанная система координат. Это означает, что она жёстко связанна с твёрдым телом (например, самолётом) и движется вместе с ним.
Пусть (ix, jy, kz) и (iu, jv, kw) – единичные векторы, направленные вдоль своей системы OXYZ и OUVW соответственно. Некоторую точку P в пространстве можно характеризовать координатами относительно любой из указанных систем:
puvw = (pu, pv, pw)T и pxyz = (px, py, pz)T (2-1)
где T - означает операцию транспонирования.
Задача состоит в том, чтобы определить матрицу R размерностью 3´3, которая преобразует координаты puvw в координаты вектора p системе OXYZ после того, как система OUVW будет повёрнута, т.е.:
pxyz = Rpuvw . (2-2)
Заметим, что физически точка p вращается вместе с системой координат OUVW.
Из определения компонент вектора имеем:
puvw = pu?iu+pv?jv+pw?kw, (2-3)
где pu, pv, и pw представляют собой составляющие вектора p вдоль осей OU, ОV, ОW соответственно, или проекции вектора p на эти оси. Используя определение скалярного произведения и равенства (2-3), получаем:
px = ix ? p = ix ? iu ? pu + ix ? jv ? pv + ix ? kw ? pw,
py = jy ? p = iy ? iu ? pu + jy ? jv ? pv + jy ? kw ? pw,
pz = kz ? p = kz ? iu ? pu + kz ? jv ? pv + kz ? kw ? pw. (2-4)
или в матричной форме:
 . (2-5)
. (2-5)
С учётом этого выражения матрица R в равенстве (2-2) примет вид:
 . (2-6)
. (2-6)
Аналогично, координаты puvw можно получить из координат pxyz:
puvw = Q ?pxyz , (2-7)
или
 . (2-8)
. (2-8)
Поскольку операция скалярного произведения коммутативна, то из соотношений (2-6)…(2-8) следует
Q = R-1 = RT, (2-9)
QR = RTR = R-1?R = I3, (2-10)
где I3 – единичная матрица размерностью 3´3.
Преобразование, определяемое формулой (2-9) или (2-10), называется ортогональным преобразованием.
Особый интерес представляет матрица поворота системы OUVW относительно каждой из трёх основных системы OXYZ. Если положение системы OUVW в пространстве изменяется за счёт поворота этой системы на угол a вокруг оси OX, то в системе отсчёта OXYZ изменяются и координаты (px, py, pz)T точки (pu, pv, pw). Соответствующая матрица преобразования Rx,a называется матрицей поворота вокруг оси OX на угол a. Основываясь на полученных выше результатах, для матрицы Rx,a имеем:
pxyz = R x,a ?puvw, (2-11)
причём ix  iu, и
iu, и
 . (2-12)
. (2-12)
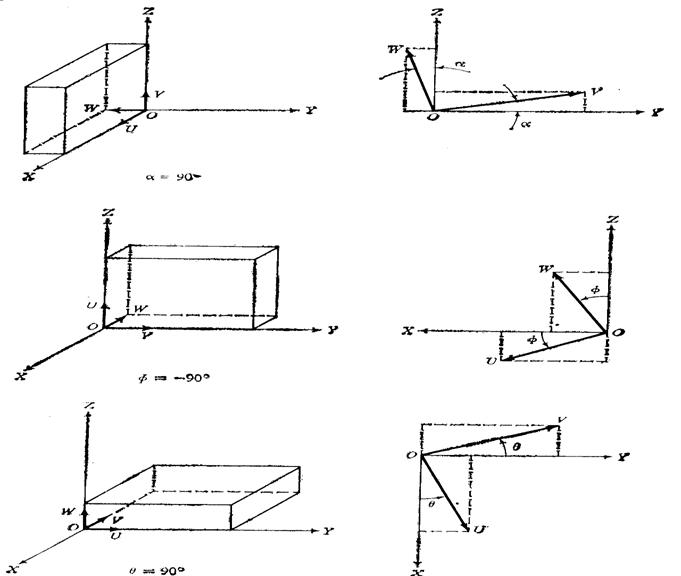
Рисунок 2.3. Вращающаяся система координат
Аналогично, трёхмерные (размерностью 3´3) матрицы поворота вокруг оси OY на угол j и вокруг оси OZ на угол q имеют соответственно вид (рис.2.3).
 ,
,  . (2-13)
. (2-13)
Матрицы Rx,a, Ry,j и Rz,q называют матрицами элементарных поворотов.
Еще по теме Прямая задача кинематики:
- Обратная задача кинематики
- Методика решения обратной задачи кинематики упругого манипулятора
- Основные задачи кинематики материальной точки.
- 3.4.2.Экспериментальная проверка методики решения обратной задачи кинематики на пространственном упругом манипуляторе
- Общие рекомендации по решению задач раздела «Кинематика»
- Решение обратной задачи кинематики для последних трех сочленений
- Постановка обратных задач кинематики и динамики упругих манипуляторов
- Решение обратной задачи кинематики для первых трех сочленений
- Прямая задача комплексного оценивания
- Численное и экспериментальное моделирование методики решения обратной задачи кинематики на пространственном упругом манипуляторе
- 48. Способы передачи чужой речи. Прямая речь, косвенная речь, несобственно-прямая речь.
- Кинематика манипулятора