Условия физической реализуемости инвариантных АСР
Одной из основных проблем, возникающих при построении инвариантных систем регулирования, является их физическая реализуемость, т. е. реализуемость компенсатора, отвечающего условиям (1.20) или (1.20а).
В отличие от обычных промышленных регуляторов, структура которых задана и требуется лишь рассчитать их настройки, структура динамического компенсатора полностью определяется соотношением динамических характеристик объекта по каналам возмущения и регулирования и может оказаться очень сложной, а при неблагоприятном соотношении этих характеристик — физически нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в следующих двух случаях.
1. Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения. В этом случае идеальный компенсатор должен содержать звено упреждения, так как если
 и
и  ,
,
то с учётом (1.10)
 .
.
При  .
.
2. Если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья. Такой результат получается при определённом соотношении порядков дифференциальных уравнений, описывающих каналы возмущений и регулирования. Пусть
 ,
,
где  - полиномы степеней
- полиномы степеней  соответственно.
соответственно.
Тогда

и  .
.
Таким образом, условие физической реализуемости инвариантной АСР заключается в том, чтобы выполнялись соотношения
 . (1.21)
. (1.21)
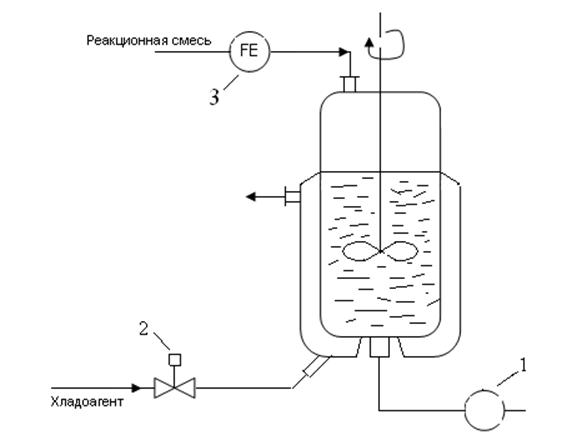
Рис.1.12 Принципиальная схема химического реактора с перемешивающим устройством:
1 - измеритель температуры; 2 – регулирующий клапан; 3 – измеритель расхода.
Еще по теме Условия физической реализуемости инвариантных АСР:
- § 2. Условия физического воспитания
- Условия правоспособности лиц физических и ограничения ее
- Лекция №4. Каскадные АСР
- Лекция №3. Комбинированные АСР
- Инвариантность объема в фазовом пространстве.
- § 3. Преступления, причиняющие физическую боль и физические страдания
- Тема №2. Общее (инвариантное) видовое значение
- Инвариантное значение ИК-4. ИК-4 как акцент контраста
- 9. Оценка устойчивости и финансовой реализуемости проекта
- РАЗДЕЛ III РЕАЛИЗУЕМ НОВЫЙ ЗАКОН
- N 3. Виды деятельности, реализуемые в ходе предварительных проверки и расследования
- Дифференциал сложной функции. Инвариантная форма записи дифференциала.
- Исходный растительный материал, его биохимические и геохимические преобразования в различных условиях обусловили формирование многочисленных однородных по своим оптическим и физическим свойствам микрокомпонентов угля, выделением и описанием которых занимается угольная петрография.
- В договоре отсутствует информация о реализуемых товарах (выполняемой работе), в том числе и обозначение стандартов, обязательным
- 17.Синтаксические связи. Свойства соединяемых компонентов, реализуемые синтаксической связью
- Формирование эффективных условий привлечения кредитов. К числу важнейших из этих условий относятся:
- § 64. Ш. Недействительность юридических сделок (Недостаток какого-либо условия. Прекращение недостатка. Отпадение условия. Превращение акта)
- аа. Суспензивное условие § 53. аа. Во время нерешительного состояния условия
- Личность в условиях болезни. Варианты личностного развития в условиях хронического соматического заболевания.
- 4.3. Оценка тепловлажностных условий в кабинах МСА в нолевых условиях