Динамический анализ стержневых механических систем при наличии в них состояний неустойчивости
Для проверки разработанного программного обеспечения (ПО) исследуем динамику геометрически нелинейной стержневой механической системы с состоянием неустойчивости.
Рассмотрим стержневую систему с распределенными параметрами, которая в исходном состоянии имеет вид простой фермы (рис.2.17, а).
Стержни фермы обладают большой жесткостью на изгиб и малой жесткостью на сжатие и растяжение. На практике стержни такой механической системы могут представлять собой амортизирующие элементы. Тогда функции, описывающие упругую силу и жесткость распределенной стержневой системы имеют вид подобныйвиду упругой силы (рис.2.17,в) и жесткости (рис.2.17,г) системы с одной степенью свободы (когда стержни являются недеформируемыми, а упругая сила создается пружинами)
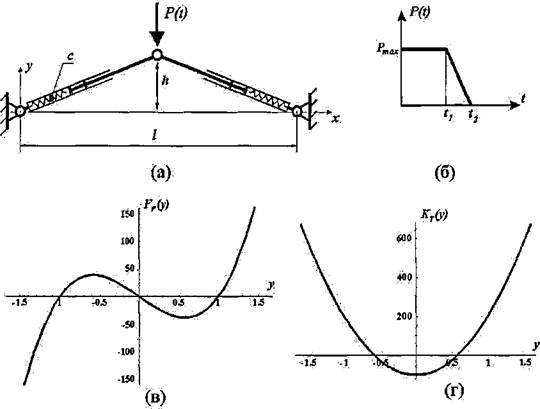
Рис.2.17. Исследуемая стержневая система: а - общий вид; б - функция возмущающего воздействия; в - упругая сила; г - жесткость системы
Fr = -100y + 100y3; Kτ = -100 + 300√.
К среднему шарниру прилагается возмущающее силовое воздействие. Подобная система имеет 3 положения равновесия - два устойчивых и одно неустойчивое (два фокуса и одно седло). В качестве возмущающей силы выбран силовой импульс (рис.2.17,6).
Расчетная схема системы состоит из 10 стержневых геометрически нелинейных конечных элементов (по 5 на каждый стержень системы). Жесткостные параметры элементов выбраны следующими: EA = 20000 H, E Iy = E Iz = 60000 H м2, G Ik = 35000 H м2. Погонная масса стержней равна 8 кг/м. Общее число степеней свободы равно 54. При расчете учитывалось пропорциональное демпфирование "по Релею": при частоте 10 гц коэффициент демпфирования составлял 0.01, при 100 Гц - 0.03. Линейные размеры конструкции (рис.3.8, а): I = 2 м, h = 0.15 м.
Шаг интегрирования Δ/ = 0.001 с, время счета на Pentium Pro 200 с Windows NT 4.0 - 1 м. 40 с.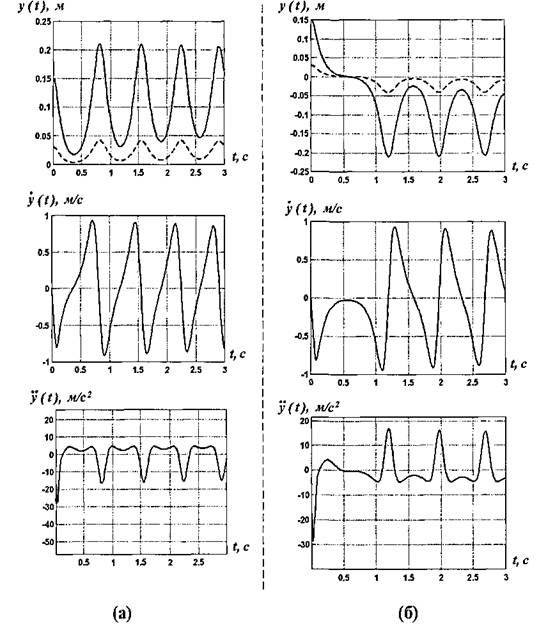
Рис.2.18. Графики вертикальных перемещений, скоростей и ускорений среднего шарнира стержневой системы (см. рис.2.17) при силовых импульсах, величиной Pmax,равной 71 H (а) и 72 H (б)
Исследована динамическая реакция системы на силовые импульсы изображенного на рис.2.17, б вида различной величины Pmax. Временные постоянные tlи t2равны 0.05 с. и 0.1 с., соответственно. На рис.2.18 и 2.19 показаны верти-
кальные перемещения, скорости и ускорения среднего шарнира системы при Pmaxравных 71 H (см. рис.2.18,а), 72 H (см. рис.2.18,6), 75 H (см. рис.2.19). Штриховыми линиями на указанных рисунках показаны вертикальные перемещения точки с, положение которой показано на рис.2.17.
Полученные результаты показывают, что динамическая реакция геометрически нелинейной системы, работающей на границе устойчивости, может су
щественно различаться при незначительном изменении возмущающих воздействий. Очевидно, что точность моделирования подобных систем является
ключевым фактором для получения адекватного решения.
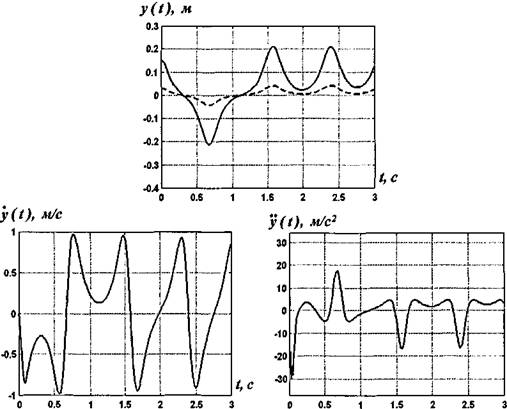
Рис.2.19. Графики вертикальных перемещений, скоростей и ускорений среднего шарнира стержневой системы (рис.2.17) при силовом импульсе Pmax= 75 H
Исследуем возможность применения разработанного ПО для динамического анализа стержневых систем при потере устойчивости стержнями системы. Для этого рассмотрим стержневую систему, изображенную на рис. 3.11.
Данная система аналогична системе на рис.2.17 за исключением того, что она состоит из тонких стальных стержней прямоугольного сечения. Размеры прямоугольного сечения: b = 0.005 м., h = 0.03 м. Характеристики материала: E = 2.185?Ю11 Н/м2, G = 8.08?lθ1° Н/м2.
Погонная масса стержней равна 3 кг/м. Учитывалось пропорциональное демпфирование с теми же параметрами, что и в предыдущем случае. Линейные размеры конструкции (рис.2.20): I = 2 м, h = 0.1 м. Плоскость наименьшей изгибной жесткости стержней совпадает с плоскостью рисунка. Расчетная схема состояла из 10 конечных элементов, число степеней свободы равно 54. В качестве возмущения выбран силовой импульс формы аналогичной рис.2.17, б с величиной Pmaxравной 250 H и постоянными времени Z1и Z2равными 0.1 с и 0.15 с, соответственно. Шаг интегрирования Δ/= 0.001 с, время счета на Pentium Pro 200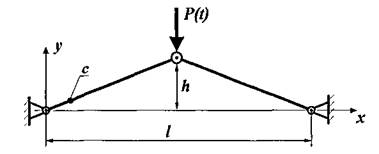 с Windows NT 4.0 - 1 м. 52 с.
с Windows NT 4.0 - 1 м. 52 с.
Рис.2.20. Ферменная конструкция из тонких стержней
На рис.2.21 показаны перемещения, скорости и ускорения среднего шарнира (см. рис.2.18), пунктирными линиями показаны перемещения точки с. Графики перемещений на рис.2.21 показывают, что происходит потеря устойчивости системы в динамике - "прощелкивание" происходит за счет продольного изгиба стержней, потерявших устойчивость. При этом в момент начала движения вниз среднего шарнира системы, средняя часть стержней движется вверх (см. перемещения точки с).
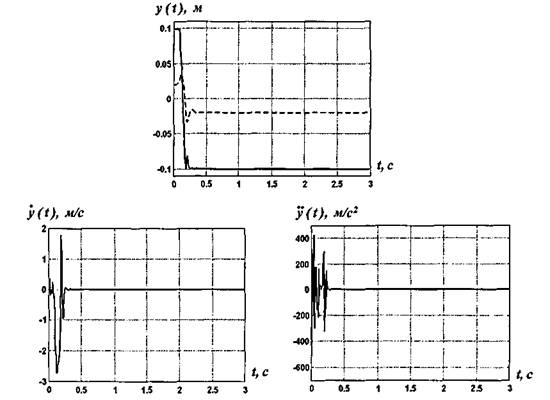
Рис.2.21. Графики вертикальных перемещений, скоростей и ускорений среднего шарнира стержневой системы (рис.2.18) при силовом импульсе величиной Pmaxравной 250 H
Динамика процесса потери стержнями устойчивости и перехода в другое положение равновесия ферменной конструкции показана на рис.2.22 в виде фаз движения отдельного стержня. На нем исходное положение показано жирной линией, а цифрами 1...7 пронумерованы соответственно положения и состоя- 152
ния стержня в следующие моменты времени: tι = 0.1, t2 = 0.135, t3 = 0.15, t4 = 0.18, t5 = 0.195, t6 = 0.21, t7 = 0.26 с.
На рис.2.23 показана зависимость первой собственной частоты колебаний стержневой системы, изображенной на рис.2.18, от величины и знака вертикальной нагрузки, приложенной к среднему шарниру системы. Все приведенные выше результаты показывают, что разработанное программное обеспечение может быть успешно применено для решения задач динамического анализа геометрически нелинейных стержневых систем. Разработанные процедуры и алгоритмы работоспособны даже в случаях потери устойчивости стержневой системой - когда матрица каса-

Рис.2.22. Процесс перехода стержневой системы, изображенной на рис.2.18, в другое положение равновесия
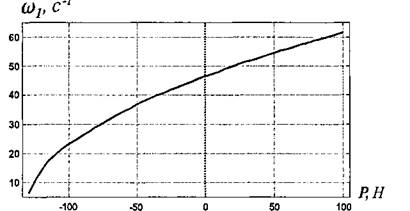
Рис.2.23. Изменение первой собственной частоты колебаний стержневой системы от нагцузки
Еще по теме Динамический анализ стержневых механических систем при наличии в них состояний неустойчивости:
- Методы построения уравнений движения геометрически нелинейных стержневых механических систем
- Анализ линейных динамических систем, работающих при входныхслучайных воздействиях
- Анализ скорости перемещения рабочей среды при механическом воздействии
- 26(2).2. Логика вопросов и защита от них (проблема соответствия воздействия состоянию системы)
- Одна из них — наличие огромного массива нормативно-правовых актов, которые не всегда публикуются и согласуются друг с
- Задачи динамики и управления движением нелинейных стержневых систем и упругих манипуляторов
- 1.1.6 Остаточная нефть при неустойчивом вытеснении
- Итерационный алгоритм статического расчета геометрически нелинейной стержневой системы
- Геометрически нелинейные математические модели стержневых систем
- Методика учета больших перемещений узлов конечноэлементной модели стержневой системы
- 25. Причины неустойчивости фонологической системы
- Модуль прямого численного интегрирования уравнений движения геометрически нелинейных стержневых систем
- 2. Связь хаоса и неустойчивости. Непредсказуемость в детерминированных системах
- Глава 1. Анализ состояния и тенденции развития системы снабжения нефтепродуктами автомобильного транспорта в условиях рыночной экономики
- Анализ и оценка состояния проблемы синтеза оптимального управления на базе нейросетевого подхода для биотехнических систем реабилитации