Методика учета больших перемещений узлов конечноэлементной модели стержневой системы
Предложенные математическая модель и конечный элемент основаны на предположении о малости углов поворота узлов стержневого элемента в его локальной системе координат. В этой связи возникает проблема учета больших поворотов и перемещений узлов конечноэлементной модели стержневой системы в глобальной системе координат.
Для решения этой проблемы предлагается методика, которая позволяет на каждой итерации выбрать положение и ориентацию локальной системы координат конечного элемента, исключив из глобальных перемещений и поворотов стержневого элемента его перемещения и повороты как твердого тела. Данная методика позволяет также правильно вычислить локальные перемещения и повороты узлов элемента (удовлетворяющие упомянутому выше предположению), необходимые для вычисления матрицы жесткости, векторов узловых сил реакции и напряжений элемента.Положение и ориентация отдельного узла в пространстве может быть одно-
значно определены тремя глобальными координатами и тремя углами Эйлера [89, 180], задающими ортогональное преобразование вращения в пространстве. Углы Эйлера не обладают свойством коммутативности и поэтому не могут содержаться в векторе узловых перемещений системы Приращения узловых перемещений
Приращения узловых перемещений в выражении (2.58) согласно сделанным гипотезам содержат малые повороты. Возникает проблема корректного учета изменения ориентации узлов при больших поворотах узлов в системе. Для учета больших поворотов и перемещений узлов стержневых элементов при нелинейном анализе предлагаемая методика должна решить три проблемы:
в выражении (2.58) согласно сделанным гипотезам содержат малые повороты. Возникает проблема корректного учета изменения ориентации узлов при больших поворотах узлов в системе. Для учета больших поворотов и перемещений узлов стержневых элементов при нелинейном анализе предлагаемая методика должна решить три проблемы:
• Корректный учет больших поворотов узлов системы в глобальной СК.
• Выбор положения и ориентации локальной CK стержневого элемента, в которой будут исключены перемещения и повороты элемента как твердого тела.
• Вычисление перемещений и поворотов узлов СКЭ в локальной СК.
Учет больших поворотов узлов системы в глобальной системе координат
Рассмотрим отдельный стержневой элемент, узлы которого в процессе упругой деформации получают некоторые перемещения. Эти перемещения можно разложить на упругие перемещения, вызывающие деформацию элемента, и перемещения абсолютно твердого тела, не вызывающие деформаций. Для исключения перемещений и поворотов абсолютно твердого тела из общих перемещений и поворотов узлов предлагается на А:-той итерации (рис. 2.8) выбирать локальную систему координат элемента так (обозначим ее как , чтобы ось х проходила через оба узла элемента. Начало системы координат совмещается с первым узлом. На нулевой итерации выбранная таким образом система совпадает с локальной системой отсчета недеформированного стержня на рис. 2.3.
, чтобы ось х проходила через оба узла элемента. Начало системы координат совмещается с первым узлом. На нулевой итерации выбранная таким образом система совпадает с локальной системой отсчета недеформированного стержня на рис. 2.3.
Рассмотрим отдельный узел конечноэлементной модели и отдельный стержневой элемент, присоединенный к этому узлу. Ориентация /-того узла относительно глобальной системы координат однозначно задается тройкой попарно перпендикулярных ортов образующих правостороннюю сис
образующих правостороннюю сис
тему координат узла Ориентация
Ориентация описывается квадратной ортогональной матрицей
описывается квадратной ортогональной матрицей строки которой содержат проекции векторов
строки которой содержат проекции векторов
nxj, nyi, nziна оси глобальной системы координат. Ориентация «вмороженной» системы координат поперечного сечения J-того элемента, присоединенного к /-тому узлу, однозначно задается тройкой попарно перпендикулярных ортов 114
 образующих правостороннюю систему координат поперечного се
образующих правостороннюю систему координат поперечного се
чения
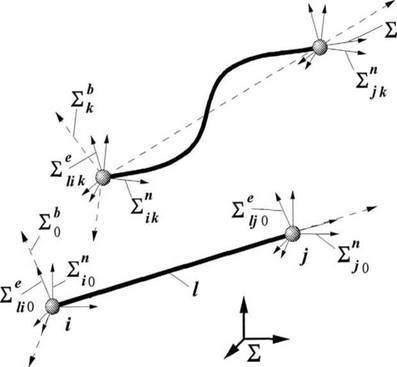
Рис.
2.8. Кинематические соотношения между узлами стержня, системой координат стержня и глобальной системой отсчетаОриентация описывается квадратной матрицей
описывается квадратной матрицей строки которой содержат проекции векторов
строки которой содержат проекции векторов на оси глобальной системы координат. Связь между матрицами
на оси глобальной системы координат. Связь между матрицами задана в виде
задана в виде

где - ортогональная матрица, задающая ориентацию систе
- ортогональная матрица, задающая ориентацию систе
мы координат j-того СКЭ в исходном недеформированном состоянии стержневой системы. В недеформированном состоянии системы, матрицы ориентации всех узлов системы принимаются единичными - а матрицы ори
а матрицы ори
ентации поперечных сечений СКЭ равны
Предположим, что получаемые при решении системы уравнений (2.57) на каждой итерации приращения поворотов отдельного узла в являются
являются
приближениями значений углов Эйлера, задающими малые повороты системы координат узла (если они малы, то последовательность поворотов не имеет значения [89, 180]). Для определения положения и ориентации /-того узла на
(если они малы, то последовательность поворотов не имеет значения [89, 180]). Для определения положения и ориентации /-того узла на
к -той итерации выделим вектор приращений перемещений этого узла из
в виде вектора в котором отдельно сгруппируем поступательные и
в котором отдельно сгруппируем поступательные и
вращательные степени свободы

соответственно, где
Выражение (2.58) можно использовать только для поступательных компонент вектора перемещений, в данном случае, координаты /-того узла на А:-той итерации определяются выражением

Ориентацию /-того узла на А:-той итерации определим матрицей

где - ортогональная матрица вращения /-того узла в пространстве.
- ортогональная матрица вращения /-того узла в пространстве.
 вычисляется как произведение трех ортогональных матриц, описывающих последовательные правые вращения вокруг осей системы координат узла на предыдущей итерации
вычисляется как произведение трех ортогональных матриц, описывающих последовательные правые вращения вокруг осей системы координат узла на предыдущей итерации 
где
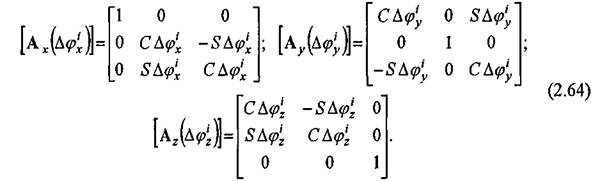
Матрица осуществляет преобразование из заданной матрицей
осуществляет преобразование из заданной матрицей
системы координат в новую систему координат при последовательном
при последовательном
повороте узла на углы
Вектор поступательных перемещений и матрица ориентации
и матрица ориентации
/-того узла однозначно определяют его положение и ориентацию относительно
глобальной системы координат. Эти кинематические параметры позволяют учесть большие перемещения и повороты узла. По мере сходимости итераций к решению системы нелинейных уравнений (2.38) приращения перемещений  будут стремиться к нулю, а
будут стремиться к нулю, а будут определять собственно
будут определять собственно
решение системы уравнений (2.38).
Определение локальной системы координат элемента и локальных перемещений и поворотов его узлов
Уравнение (2.59) позволяет вычислить ориентацию «вмороженной» системы координат поперечного сечения j-того стержневого элемента в z -том узле.
Получив матрицы и координаты для обоих узлов элемента, возможно
и координаты для обоих узлов элемента, возможно определить ориентацию локальной системы координат элемента, а также вычислить локальные перемещения и повороты узлов элемента в его локальной системе координат, которые необходимы для вычисления локальной матрицы касательной жесткости и вектора узловых сил реакции.
Локальная система координат (тройка ортов
(тройка ортов / -того СКЭ (со
/ -того СКЭ (со
держащего узел / в начале и узел jв конце) выбирается так, что ее начало лежит в узле /, ее ось х проходит через узлы / и j - рис. 2.8. Поступательные перемещения узлов СКЭ в локальной CK определяются выражением  где L0- исходная длина элемента в недеформированном состоянии, a L- текущее расстояние между узлами на итерации.
где L0- исходная длина элемента в недеформированном состоянии, a L- текущее расстояние между узлами на итерации.
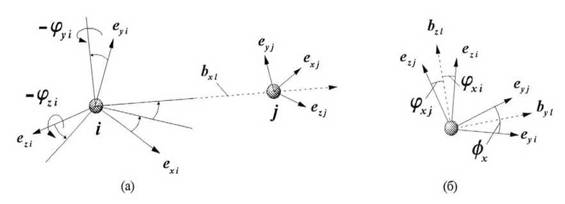
Рис. 2.9. Определение поворотов узлов в локальной системе координат стержневого элемента
Определение углов поворота узлов в локальной CK элемента требует более
сложных вычислений. Для 7-того СКЭ с узлами іи jпо (2.59) можно вычислить матрицы которые описывают ориентацию CK поперечных
которые описывают ориентацию CK поперечных
сечений элемента в указанных узлах. Считая углы поворота узлов в локальной CK элемента малыми, будем руководствоваться принципами (рис. 2.9):
• Изгибные углы поворота узла φz, φyравны отрицательным значениям углов поворотов, на которые нужно последовательно повернуть связанную с узлом систему координат поперечного сечения вокруг ее осей ezи еу для совмещения ее оси ех с осью Xлокальной CK элемента - bx(рис.
2.9,а).• Угол закручивания фх узлов іи jэлемента относительно друг друга определяется как угол между осями eziи ezjсвязанных с узлами CK поперечных сечений, повернутых согласно предыдущему пункту (рис. 2.9,6). Угол измеряется по правилу правого винта в направлении оси bx. При этом ориентация оси bzлокальной системы координат элемента выбирается между ezjи ezj,а углы закручивания узлов принимаются равными

Для нахождения изгибных углов поворота узлов по принципу 1 необходимо решение обратной кинематической задачи, в которой известными являются направляющие косинусы оси bxлокальной CK СКЭ. Матрица ортогонального вращения на искомые углы ортов ex, ey, ez CK поперечного сечения определяется выражением (2.67). Первая строка матрицы в (2.67) содержит направляющие косинусы оси bxв системе координат заданной осями ex, ev, ez.
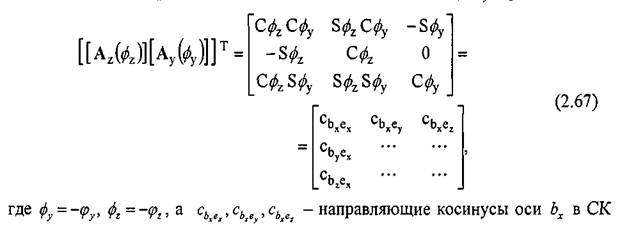
связанного с узлом поперечного сечения элемента с осями ex, ey, ez.Эти направляющие косинусы можно вычислить, зная направляющие косинусы оси bx элемента в глобальной CK из следующего выражения
из следующего выражения
Для определения угла закручивания фх найдем направляющие косинусы осей ezjи ezjв глобальной системе координат после совмещения осей exiи exj с осью bxэлемента. Для /-того узла /-того элемента направляющие косинусы оси eziнаходятся из выражений (2.59), (2.67) в виде вектора-строки

Вычислив по (2.70) также направляющие косинусы для ezjнайдем угол между ними, используя свойство векторного произведения
- угол между векторами а и b при повороте по правилу правого винта от а к b. Можно записать

Вектор-результат векторного произведения в (2.71) коллинеарен оси bxлокальной системы координат стержневого элемента. Это можно использовать для определения знака угла закручивания фх. Конечное выражение для вычисления угла закручивания фх можно записать в следующем виде

где - вектор-строка с направляющими косинусами оси
- вектор-строка с направляющими косинусами оси
bxв глобальной системе координат.
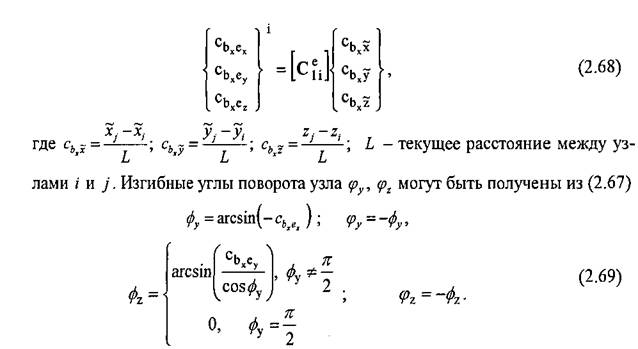
Подытоживая приведенные выкладки для определения углов поворота узлов /и jв локальной CK стержневого элемента, углы кручения в узлах φxiи
φxjбудем вычислять по формулам (2.66), (2.70), (2.71), а изгибные углы φyi, φzi и φyj, φzj- по формулам (2.68), (2.69).
Предложенная методика определения углов поворота узлов в локальной CK СКЭ была протестирована на одном стержневом элементе. Элемент произвольно перемещался и поворачивался в пространстве как абсолютно твердое тело без деформаций. Получаемые по предложенной методике углы поворота в его локальной CK в любом положении СКЭ равнялись нулю. Проводились также тесты с деформированным стержневым элементом при наличии начальных из- гибных и крутильных поворотов в узлах. Результаты показали, что при малых начальных поворотах в локальной системе координат, получаемые после произвольного перемещения стержня как твердого тела в пространстве повороты в новой локальной системе координат совпадают с начальными поворотами при небольшой погрешности. Например, при заданном в начале угле кручения 0.1 рад. и после поворота каждого узла на приращения поворотов  рад., в новой локальной системе координат тот же угол кручения был получен с погрешностью 0.003 рад, что примерно на 2 порядка меньше чем сам угол. Погрешность увеличивается при увеличении локальных углов поворота в системе координат стержня и при увеличении приращений поворотов. Малость локальных углов поворота обеспечивается соответствующей частотой разбиения на конечные элементы, а малость приращений поворотов - ступенчатым увеличением нагрузки на итерациях [63, 66].
рад., в новой локальной системе координат тот же угол кручения был получен с погрешностью 0.003 рад, что примерно на 2 порядка меньше чем сам угол. Погрешность увеличивается при увеличении локальных углов поворота в системе координат стержня и при увеличении приращений поворотов. Малость локальных углов поворота обеспечивается соответствующей частотой разбиения на конечные элементы, а малость приращений поворотов - ступенчатым увеличением нагрузки на итерациях [63, 66].
2.5.
Еще по теме Методика учета больших перемещений узлов конечноэлементной модели стержневой системы:
- Конечноэлементная модель геометрически нелинейного стержневого элемента
- Геометрически нелинейные математические модели стержневых систем
- 3.2. Методика бухгалтерского учета при совмещении общепринятой системы налогообложения и системы налогообложения в виде единого налога на вмененный доход в торговой деятельности
- Итерационный алгоритм статического расчета геометрически нелинейной стержневой системы
- 3.4. Методика построения модели угроз системам защиты информации сайтов органов власти Российской Федерации
- Модуль прямого численного интегрирования уравнений движения геометрически нелинейных стержневых систем
- Динамический анализ стержневых механических систем при наличии в них состояний неустойчивости
- Задачи динамики и управления движением нелинейных стержневых систем и упругих манипуляторов
- Методы построения уравнений движения геометрически нелинейных стержневых механических систем
- 2. Методика учета
- 2.2. Модель раздельного бухгалтерского учета расходов общего назначения
- 3.1. Математическая модель сильно сжатого на большой глубине породного массива
- Численное моделирование динамики нелинейных упругих стержневых систем с переменными инерционными и жесткостными параметрами
- Факторы создания модели управленческого учета под воздействием условий макро- и микросреды