Решение для шестого сочленения
Необходимо получить такую ориентацию схвата, чтобы поднять объект манипулирования. Для этого надо так расположить схват, чтобы s=y6. Проецируя систему координат схвата (n, s, a) на плоскость x5y5, получаем (рис.
8.4):  ,
,  , (8-18)
, (8-18)
где  - второй столбцы матрицы
- второй столбцы матрицы  , a n и s– соответственно нормальный и касательный векторы матрицы
, a n и s– соответственно нормальный и касательный векторы матрицы  .
.
Таким образом, для  имеем:
имеем:
 =
=
= ,
,
 . (8-19)
. (8-19)
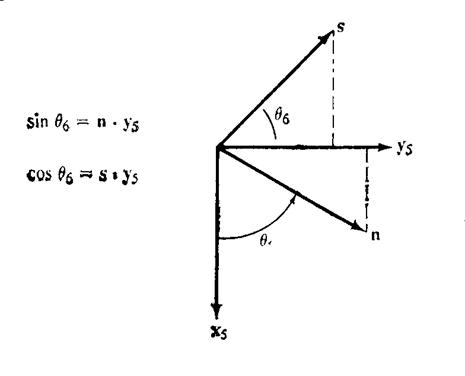
Рисунок 8.4. Решение для 6-го сочленения
Итак, для шестизвенного манипулятора «Пума» существует восемь решений обратной задачи кинематики. Решения для первых трёх присоединённых углов  обеспечивают требуемое расположение руки (первых трёх звеньев), а углы
обеспечивают требуемое расположение руки (первых трёх звеньев), а углы  обеспечивают заданную ориентацию схвата. Для первых трёх присоединённых углов существует 4 решения: два - для манипулятора с левосторонней конфигурацией и два – с правосторонней. Для каждой конкретной конфигурации манипулятора равенства (7-18), (7-26),
обеспечивают заданную ориентацию схвата. Для первых трёх присоединённых углов существует 4 решения: два - для манипулятора с левосторонней конфигурацией и два – с правосторонней. Для каждой конкретной конфигурации манипулятора равенства (7-18), (7-26),
(8-7), (8-15), (8-17), (8-19) дают решение  обратной задачи кинематики, причем
обратной задачи кинематики, причем  также является решением этой задачи (если ПЕРЕКЛЮЧАТЕЛЬ «включен»).
также является решением этой задачи (если ПЕРЕКЛЮЧАТЕЛЬ «включен»).
Еще по теме Решение для шестого сочленения:
- Решение для пятого сочленения
- Решение для первого сочленения
- Решение обратной задачи кинематики для последних трех сочленений
- Решение для второго сочленения
- Решение для третьего сочленения
- Решение для четвертого сочленения
- Решение обратной задачи кинематики для первых трех сочленений
- Устройство позиционирования для одного сочленения манипулятора
- Звенья, сочленения и их параметры
- [Против «Шестого размышления»] [С о м и е н и е I]
- Уравнения движения манипулятора с вращательными сочленениями
- О ВОЗРАЖЕНИЯХ ПРОТИВ «ШЕСТОГО РАЗМЫШЛЕНИЯ»
- ДЕБАТЫ ШЕСТОГО РЕЙНСКОГО ЛАНДТАГА
- ПЕТЕРБУРГ ШЕСТОГО "Б" - В ТРЕХ ДОЖДЛИВЫХ ДНЯ
- Передаточная функция одного сочленения робота