Описание системы стационарных и стационарно связанных сигналов
Взаимная корреляционная функция (ВКФ) системы имеет вид:
Ryft,12) = M Xft)Y(t2)
Для описания системы двух случайных процессов необходимо знать двумерную плотность вероятности
(1.97)
f [X ft), Y (t 2)] = f (X, t, + u, 12 + u).
Выражение (1.97) представляет собой условие стационарной связности.
Как в случае АКФ, положим т = 12 - tj. Рассмотрим свойства ВКФ системы двух стационарно связанных сигналов. 1. Так какRxy ft,12) = Ryx (t 2 ' t1 X
то
(198)
yx '
Rxy (т) = RVx (-т)
(в соответствии с рисунком 22).
2. Аналогично
(199) (1.100)
х У '
Rxy(т) ;
3. Rxy (0) ^ax^y.
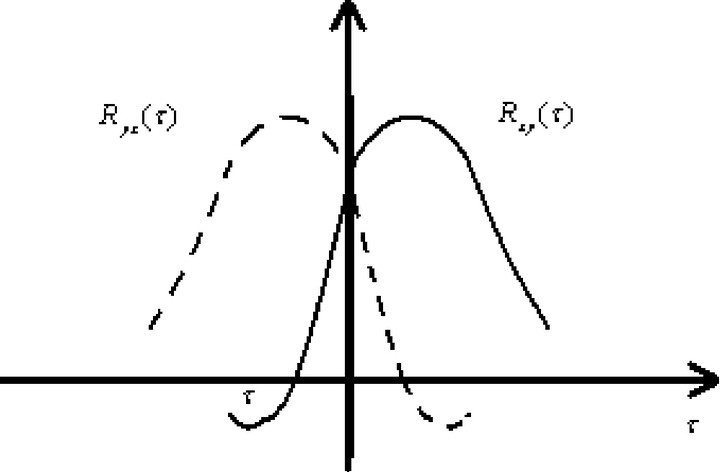
Рисунок 22- График ВКФ системы двух стационарно связанных сигналов
Нормированная функция взаимной корреляции:
Ру(т) = ^ (1.101)
обладает аналогичными свойствами:
Pxy(т) = Pxy (-T);
Pxy (T) < 1.
Для приближенного описания ВКФ используется ряд характеристик: координата и величина экстремума, интервал взаимной корреляции, моментные характеристики и производные ВКФ при различных значениях аргументах.
Интервал взаимной корреляции двух стационарно связанных случайных сигналов определяется как интервал времени, внутри которого ВКФ отлична от нуля, а вне его - равна или близка к нулю (в соответствии с рисунком 23).

Способы отыскания сходны со способами определения интервала корреляции с отличием, что в данном случае приходится оценивать взаимодействие как в положительной, так и в отрицательной области.
(1.102)
Р^ (т) = S;
ад 0 ад
ткв = \pxy (r)dr= \py (T)dr + \pxy (r)dr
—ад —ад 0
адад
= $pxy (T)dT+\pxy(T)dT;
00
ад
Т = $\py (т) |dr;
—ад ад
Т = j\pl (r)\dr.
Так же, как и в случае АКФ, для приближенного описания ВКФ используют ее моменты, которые определяются следующим образом:
uq = J т qPy ( т^ (1.106)
—ад
где q- порядок момента.
Если известна координата максимального значения ВКФ, то можно использовать и такие моменты:
ад
= J(т — оq Py ( т)dт. (1.107)
—ад
Еще по теме Описание системы стационарных и стационарно связанных сигналов:
- Нормализация стационарных случайных процессов линейными динамическими системами
- Математическое описание системы двух случайных сигналов
- Стационарные реализации
- Математическое описание систем случайных сигналов вчастотной области
- Исследование стационарных точек
- Амбулаторно-поликлиническая, стационарная помощь
- Спектральное представление стационарного сигнала, рассматриваемого на ограниченном интервале времени
- Неканоническая модель стационарного случайного сигнала(по Чернецкому)
- Стационарные случайные процессы
- Стационарная помощь.