Моделирование ошибок при вычислении местоположения поданным одометрии
Для моделирования случайных ошибок при вычислении местоположения по данным одометрии мы использовали метод [98,303], аналогичный методам, описанным в работах Кроули [240], Конолиджа [286] и Чонга [228].
В указанных работах неопределенность местоположения мобильного робота ξ описывается симметричной ковариационной матрицей следующего вида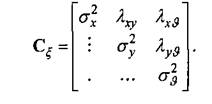
289
Эта ковариационная матрица рекурсивно вычисляется (обновляется) при движении робота. Основными причинами, увеличивающими неопределенность местоположения, являются неточные движения робота и ошибка в задании начального местоположения. Даже если предположить, что движения робота абсолютно точны, то неопределенность его местоположения все равно будет из-за второй причины — неопределенности в задании начальной ориентации робота.
Так как уравнения движения робота (4.5) являются неголономными и нелинейными, то уравнение рекурсивного обновления для ковариационной матрицы  может быть получено только для малого приращения вектора состояния
может быть получено только для малого приращения вектора состояния
 . Приращение
. Приращение можно разделить на приращение пройденного расстояния δ sи приращение поворота
можно разделить на приращение пройденного расстояния δ sи приращение поворота
В настоящей работе мы предполагаем, что существуют три типа основных ошибок, вносящих вклад при интегрировании уравнений движения (4.5) по приращениям вектора
• Ошибка расстояния δs,вызванная разницей между расстоянием, вычисленным системой одометрии, и действительно пройденным роботом расстоянием.
• Ошибка дрейфа, вызванная разницей между расстояниями, пройденными каждым из ведущих колес. Эта ошибка ведет к изменению ориентации робота и, в конечном итоге, к отклонению робота от движения по прямой линии.
• Ошибка поворота вызванная разницей между вычисленным системой одометрии и действительным углом поворота робота.
вызванная разницей между вычисленным системой одометрии и действительным углом поворота робота.
Первые две ошибки возрастают по мере движения, а последняя ошибка возрастает с количеством поворотов, сделанных роботом. В первом приближении, для малого приращения ошибки расстояния, дрейфа и поворота могут быть линейно представлены коэффициентами
ошибки расстояния, дрейфа и поворота могут быть линейно представлены коэффициентами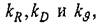 соответственно. Поэтому
соответственно. Поэтому
неопределенность позиции, возникающая при малом изменении положения робота , может быть задана следующей ковариационной матрицей
, может быть задана следующей ковариационной матрицей
Верхний индекс (г) показывает, что матрица задана в начальной системе координат робота до выполнения малого перемещения Для приведения данной ковариационной матрицы в глобальную систему координат следует использовать выражение
Для приведения данной ковариационной матрицы в глобальную систему координат следует использовать выражение

Данная матрица описывает неопределенность, возникающую от неточности движений робота. Для вычисления неопределенности, возникающей из-за второй причины — ошибки в задании начального местоположения робота, - запишем уравнения движения робота в приращениях (4.5) через рекурсивное выражение

В данном случае предполагается, что движения робота точны.
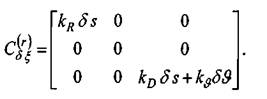
Выражение (6.9) может быть линеаризованно с помощью разложения в ряд Тэйлора
где матрица Якоби, вычисляемая в виде
матрица Якоби, вычисляемая в виде
Из (6.10) изменение местоположения робота выражается как . Таким
. Таким
же образом в линеаризованном уравнении изменится и начальная погрешность положения робота. Обозначив начальную ошибку как , ошибку после перемещения
, ошибку после перемещения и учитывая, что ковариационная матрица для ошибки
и учитывая, что ковариационная матрица для ошибки
вычисляется при помощи выражения , получим выражение
, получим выражение

которое может быть использовано для рекурсивного обновления начальной ковариационной матрицы , описывающей общую неопределенность положения робота перед совершением малого перемещения
, описывающей общую неопределенность положения робота перед совершением малого перемещения Выражение (6.11) предполагает, что движения робота точны.
Выражение (6.11) предполагает, что движения робота точны.
В конечном счете, мы объединим уравнения (6.8) и (6.11), чтобы получить общее рекурсивное уравнение, учитывающее обе причины увеличения неопределенности в положении робота при его движении

Данное выражение получено для малого приращения в позиции робота. Выражение рекурсивно — здесь ковариационная матрица является результатом вычисления по выражению (6.12) для предыдущего малого приращения.
является результатом вычисления по выражению (6.12) для предыдущего малого приращения.
6.2.5.
Еще по теме Моделирование ошибок при вычислении местоположения поданным одометрии:
- Увеличение неопределенности местоположения робота при использовании вероятностной модели движения
- 1.10.3. Распространение ошибок в начальных данных при решении обыкновенных дифференциальных уравнений.
- 3.3.1 Исследование регуляризнрующих свойств алгоритма при отсутствии ошибок модели движения
- 1.4. Порядок действий при арифметических вычислениях
- Упражнение VII О том, что у Аристотеля встречается бесчисленное множество ошибок 1. Аристотелевские «Категории» полны ошибок, нечестия и лжи
- 3.5.4 Численное моделирование при совместных ошибках модели поля Земли и ошибках баллистического коэффициента
- 3.2. Исследование влияния дополнительных погрешностей значений контролируемых параметров на величины ошибок первого и второго рода при косвенном контроле технического состояния ЛТС
- Обзор вычислительных методов, используемых при моделировании
- 3.3. Выявление и устранение прокурором ошибок в определении пределов доказывания при утверждении обвинительного заключения
- 3.5.1 Описание допущений, принимаемых при численном моделировании
- 3.3. Исследование влияния положения полей допусков значений контролируемых параметров, а также методической и эксплуатационной составляющих погрешности на величины ошибок первого и второго рода при использовании алгоритма диагностирования.
- 6.10. Вычисление теплоемкостей cv и cp, сравнение вычисленных значений с опытными
- 3.1. Исследование влияния дополнительных погрешностей значений контролируемых параметров на величины ошибок первого и второго рода при прямом контроле технического состояния АТС.
- 2.5. Определение математических зависимостей для расчета вероятностей ошибок первого и второго рода в условиях повторяемости, промежуточной прецизионности и воспроизводимости при реализации стандартного метода измерений.