Геометрически нелинейный стержневой конечный элемент
Для вывода выражений, описывающих геометрически нелинейный конеч
ный элемент воспользуемся стандартной методологией [63]. Стержневой конечный элемент (СКЭ) в пространстве, его локальная система координат x,y,z, а также возможные перемещения его узлов изображены на рис.2.3.
Каждый узел СКЭ имеет 6 степеней свободы u,v,w,φx,φy,φz: 3 поступательные и 3 вращательные. Начало локальной системы координат лежит в одном из узлов стержня, который будет считаться первым узлом (узел і). Ось х локальной системы координат направлена к другому (второму) узлу /ив недеформированном состоянии совпадает с нейтральной осью стержня.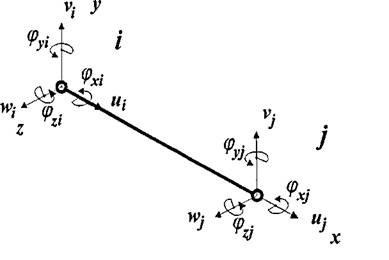
Рис. 2.3. Стержневой конечный элемент в пространстве
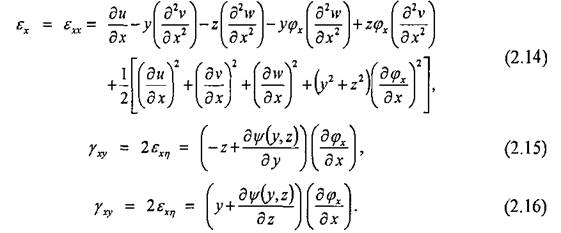
Вектор деформации для данного СКЭ, при одномерном напряженно деформированном состоянии, содержащий компоненты осевой деформации и деформации кручения, можно записать в форме [10, 114, 245]

Подставив (2.10-2.12) в (2.13) получим (при подстановке координаты ηи ξв поперечном сечении стержня заменяются на у и z, xlна х, ф на φx)
Полученный вектор деформации удобно разложить на несколько состав
ляющих и записать в виде, подобно [63]

где ' - соответственно линейные, билинейные и нелинейные со
' - соответственно линейные, билинейные и нелинейные со
ставляющие этого вектора равные
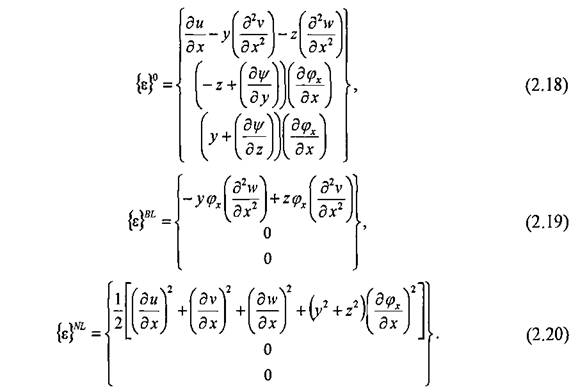
Выражение для полностью соответствует линейной теории при учете растяжения, изгиба и кручения.
полностью соответствует линейной теории при учете растяжения, изгиба и кручения.
 описывает взаимосвязь между изгибом и кручением, и нелинейный
описывает взаимосвязь между изгибом и кручением, и нелинейный описывает нелинейную зависимость осевой деформации от перемещений.
описывает нелинейную зависимость осевой деформации от перемещений. Введем вектор перемещений, однозначно определяющий с учетом сделанных гипотез и предположений перемещения любой точки поперечного сечения СКЭ [245]
и вектор производных перемещений ПО X [63]

Введем вектор узловых перемещений, упорядоченный в следующем виде

Аппроксимируем перемещения стержня (2.21) и их производные (2.22) через функции формы и вектор узловых перемещений [63] в виде


a [N] - матрица функций формы, которая может быть записана в следующем блочном виде
і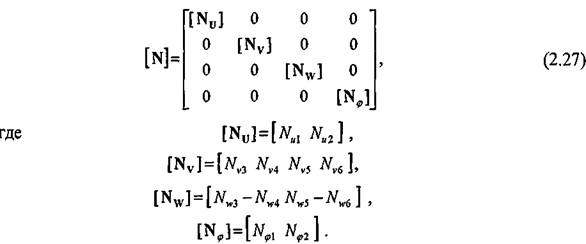
Функции формы описывают бесконечномерное поле
описывают бесконечномерное поле
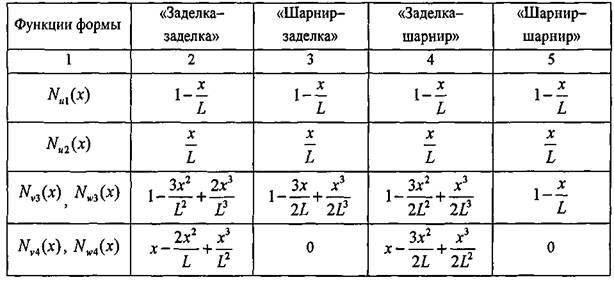
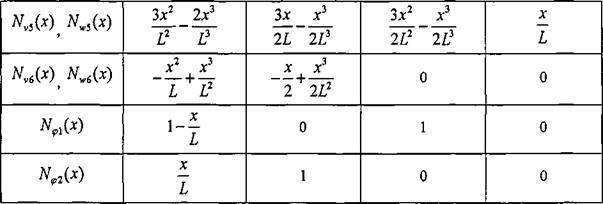
перемещений внутри стержневого элемента как функцию конечного числа узловых перемещений [10]. Указанные функции формы выбираются по граничным условиям закрепления СКЭ. Поля перемещений при изгибе аппроксимируются кубическими полиномами, при растяжении-сжатии и кручении линейными полиномами, содержащими, соответственно, четыре и два члена, что равно числу узловых степеней свободы соответствующих каждому компоненту вектора перемещений (2.21).
Так как угол закручивания элемента считается малым, то условия закрепления в соответствующих плоскостях изгиба элемента считаются постоянными (табл. 2.1)Таблица 2.1. Функции формы для всех типов закрепления узлов СКЭ
На рис. 2.4 показаны графики функций формы, которые были использованы для аппроксимации поля перемещений при изгибе стержня, причем на рис. 2.4 (а) и (б) - связанные с линейными изгибными перемещениями первого и второго узла для различных граничных условий, на рис. 2.4 (в) и (г) - связанные с по
воротами первого и второго узлов в плоскости изгиба стержня.
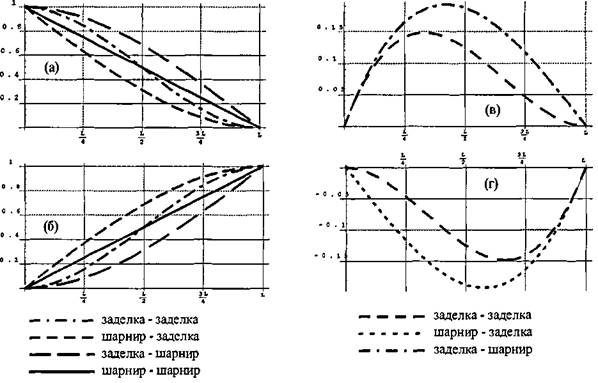
Рис. 2.4. Графики функций формы, аппроксимирующие изгиб стержня
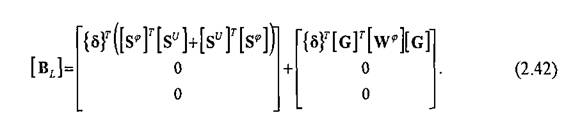
Используем выражения (2.21-2.27) для аппроксимации составляющих век
тора деформации (2.18-2.20), выразив их в компактной матричной форме. Ли
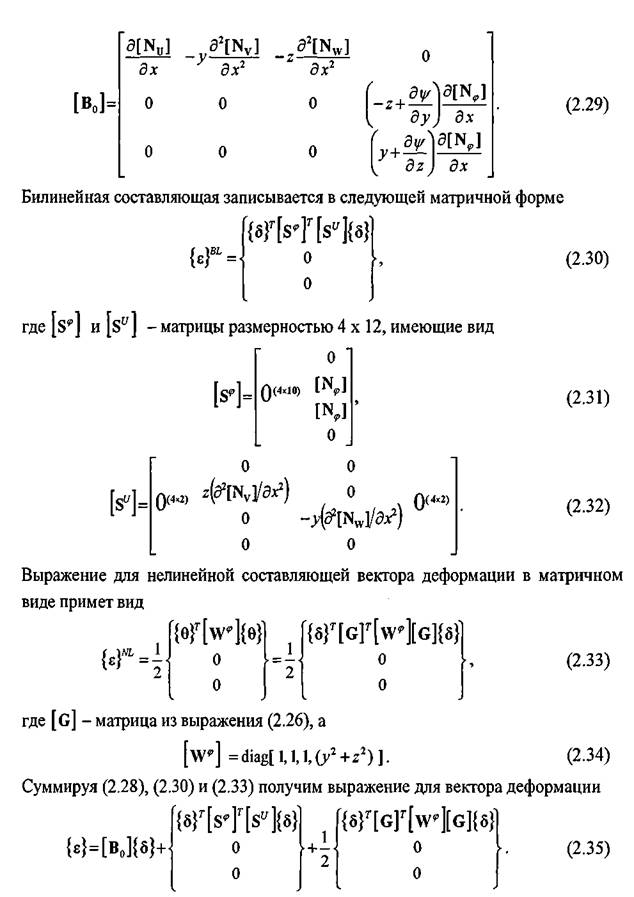
нейная составляющая вектора деформации запишется как

где [B0] - матрица, описывающая бесконечно малые деформации вида
На основе гипотезы малых деформаций зависимость между напряжениями и деформациями предполагается линейной. Обозначим напряжения в стержневом конечном элементе как вектор {σ}, компоненты которого представляют со-
бой нормальные осевые и касательные напряжения

где - диагональная матрица упругости.
- диагональная матрица упругости.
Равновесие деформированного стержня обеспечивается равенством приложенных к стержню внешних сил и внутренних упругих сил реакции стержня.
В геометрически нелинейной математической модели внутренние упругие силы в стержне в общем случае являются нелинейными функциями его упругих перемещений. Для пространственного СКЭ вектор внутренних упругих сил реакции {fr}является нелинейной функцией вектора перемещений его узлов {δ}. Для отдельного СКЭ вектор узловых реакций может быть получен как работа внутренних сил на возможных единичных перемещениях [63] в следующем виде где V- объем стержневого конечного элемента. Необходимое условие равновесия стержневой системы в целом может быть записано в следующем виде
где V- объем стержневого конечного элемента. Необходимое условие равновесия стержневой системы в целом может быть записано в следующем виде 
где {r}- вектор приложенных к системе внешних узловых сил,

- общий вектор внутренних сил реакции системы, - общий вектор перемещений (узловых степеней свободы) в глобальной системе координат,
- общий вектор перемещений (узловых степеней свободы) в глобальной системе координат, - вектор невязки внутренних и внешних узловых сил, к - число СКЭ в системе,
- вектор невязки внутренних и внешних узловых сил, к - число СКЭ в системе, общий объем стержневой системы.
общий объем стержневой системы.
Матрица в (2.37) связывает приращения узловых перемещений с приращениями деформаций в элементе стержня
в (2.37) связывает приращения узловых перемещений с приращениями деформаций в элементе стержня

Матрица вычисляется как сумма двух следующих матриц
вычисляется как сумма двух следующих матриц

где - матрица малых деформаций (2.29), а матрица
- матрица малых деформаций (2.29), а матрица линейно зависит от узловых перемещений элемента {δ}.
линейно зависит от узловых перемещений элемента {δ}.
Для краткости дальнейшей записи перепишем (2.35) в форме

где

C учетом уравнений (2.36), (2.37) и (2.43) получим окончательное выражение для вычисления вектора узловых сил реакции, соответствующих внутренним упругим силам в виде

где интеграл по объему был заменен двойным интегралом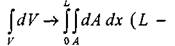 начальная длина СКЭ, А - площадь его поперечного сечения).
начальная длина СКЭ, А - площадь его поперечного сечения).
Для решения системы нелинейных уравнений (2.38) используют итерационный метод Ньютона и его разновидности [66, 238]. Для получения приближенного значения вектора на каждой итерации необходимо найти зависимость между
на каждой итерации необходимо найти зависимость между Для этого продифференцируем уравнение (2.38)
Для этого продифференцируем уравнение (2.38)

где - матрица касательной жесткости системы, равная сумме матриц касательных жесткостей элементов системы, приведенных к глобальной системе координат. Матрица касательной жесткости отдельного СКЭ в его локальной системе координат находится в виде суммы матриц
- матрица касательной жесткости системы, равная сумме матриц касательных жесткостей элементов системы, приведенных к глобальной системе координат. Матрица касательной жесткости отдельного СКЭ в его локальной системе координат находится в виде суммы матриц

где [к0] - обычная матрица жесткости при малых деформациях, [к; ] - матрица больших перемещений, [Kσ] - матрица геометрической жесткости, зависящая от величины осевых напряжений.
Сумму двух матриц [K0]+[Kl]можно 107получить из второго слагаемого в (2.46), учитывая соотношения (2.36) и (2.40)

Матрица аналогична обычной матрице жесткости, однако в ней дополнительно учитывается изменение геометрии стержневого элемента.
аналогична обычной матрице жесткости, однако в ней дополнительно учитывается изменение геометрии стержневого элемента.
Выражение для вычисления матрицы получаем из первого слагаемого в (2.46), принимая во внимание, чтс
получаем из первого слагаемого в (2.46), принимая во внимание, чтс

После подстановки (2.36) и (2.42) в (2.49) получим

В выражении (2.50) Tx- осевая компонента вектора напряжений (2.36), вычисляемая по формуле
Из (2.51) следует, что осевое напряжение Txи осевая сила являются нелинейными функциями перемещений. Физически это означает то, что в изогнутом стержне осевая сила непостоянна по его длине (что соответствует утверждению теории тонких стержней [67, 153]). Вычисление осевой силы по (2.51) при вычислении матрицы геометрической жесткости [Kσ] позволяет уточнить геометрически нелинейную модель стержневого элемента по сравнению с ранее опубликованными математическими моделями [65, 163, 210, 245, 326]. Степень уточнения тем больше, чем больше изгиб стержня.
Еще одним уточнением в предлагаемой геометрически нелинейной математической модели является учет взаимосвязи между прогибом стержня и его кручением. Как будет показано позже, уточненная модель позволяет учесть:
• появление упругой осевой силы при кручении стержня;
• появление крутящего момента при пространственном изгибе стержня с поперечным сечением без центральной симметрии.
2.2.2.
Еще по теме Геометрически нелинейный стержневой конечный элемент:
- Алгоритмы и программные модули моделирования геометрически нелинейного стержневого конечного элемента
- Конечноэлементная модель геометрически нелинейного стержневого элемента
- Геометрически нелинейные математические модели стержневых систем
- Модуль прямого численного интегрирования уравнений движения геометрически нелинейных стержневых систем
- Итерационный алгоритм статического расчета геометрически нелинейной стержневой системы
- Методы построения уравнений движения геометрически нелинейных стержневых механических систем
- Задачи динамики и управления движением нелинейных стержневых систем и упругих манипуляторов
- 10.1. Геометрическая интерпретация задач нелинейного программирования
- Численное моделирование динамики нелинейных упругих стержневых систем с переменными инерционными и жесткостными параметрами
- Упругие характеристики отдельного конечного элемента
- 2. Элементы нелинейного анализа
- Особенности реализации модели в методе конечных элементов
- Глава 232 Тройная трансляция с конечным транслированным элементом I
- Глава 233 Четырехкратная трансляция с конечным транслированным элементом О
- Глава 229 Тройная трансляция с конечным транслированным элементом О
- Глава 231 Тройная трансляция с конечным транслированным элементом Е
- Глава 234 Четырехкратная трансляция с конечным транслированным элементом А
- Глава 235 Четырехкратная трансляция с конечным транслированным элементом Е или I
- Проверка корректности работы программы и выбор числа конечных элементов по заданной точности вычислений