Расчет 4-3-4 - траектории
Для определения N траекторий присоединенных переменных для каждого участка траектории, воспользуемся нормированием времени  .
.
Обозначения:
t– нормированное время, ;
 - реальное время (сек);
- реальное время (сек);
 - момент окончания i–го участка траектории;
- момент окончания i–го участка траектории;
 -интервал реального времени, затраченного на
-интервал реального времени, затраченного на
прохождение i–го участка траектории;

 .
.
Траектория движения j–й присоединенной переменной задается в виде последовательности полиномов  :
:
 (1-й участок), (14-2)
(1-й участок), (14-2)
 (2-й участок) (14-3)
(2-й участок) (14-3)
 (последний участок), (14-4)
(последний участок), (14-4)
где i–й коэффициент j–го участка траектории рассматриваемой присоединенной переменной.
Граничные условия выбранной системы полиномов:
1. Начальное положение =  .
.
2. Значение начальной скорости = (обычно нулевое).
(обычно нулевое).
3.
Значение реального ускорения = (обычно нулевое)
(обычно нулевое) 4. Положение в точке ухода =  .
.
5. Непрерывность по положению в момент , т.е.
, т.е. 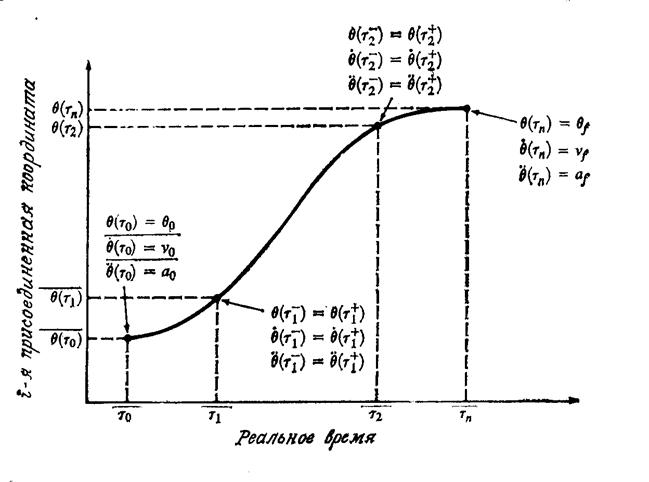 .
.
6. Непрерывность по скорости в момент , т.е.  .
.
7. Непрерывность по ускорению в момент , т.е.  .
.
8. Положение в точке =  .
.
9. Непрерывность по положению в момент  , т.е.
, т.е.  .
.
10. Непрерывность по скорости в момент , т.е.  .
.
11. Непрерывность по ускорению в момент , т.е.  .
.
12. Конечное положение = 
13. Значение конечной скорости =  (обычно нулевое).
(обычно нулевое).
14. Значение конечного ускорения = (обычно нулевое).
(обычно нулевое).
Еще по теме Расчет 4-3-4 - траектории:
- Граничные условия для 4-3-4-траекторий
- Планирование траекторий манипулятора
- Синтез оптимальной траектории.
- Сглаженные траектории в пространстве присоединенных переменных
- §3. Классификация МПШ по свойствам траекторий.
- Построение оптимальной траектории при данных краевых условиях.
- 4.1. Визуальный анализ траекторий движения мелющей загрузки
- Траектория движения мелющих тел при водопадном режиме работы мельницы
- 515. К какому типу расчетов - наличным или безналичным - относятся расчеты с использованием банковских карт?
- Джейн Бурбанк, Фредерик Купер Траектории империи
- Определение силы давления шаров, сошедших с первой траектории
- § 1. Общие положения о расчетах (ст. 861-862) 513. Допускается ли ГК введение ограничений предельной суммы расчетов наличными деньгами?
- Методина расчета требуемой доходности в расчете на период владения акциями
- 2. Проведение предварительных расчетов 2.1. Расчет издержек хранения
- 1.3. Анализ известных методик расчета тепловых схем модульных котельных и систем расчетов утилизации теплоты
- 6. Расчет единовременных нетто-ставок по страхованию рент Обшие принципы расчета
- 8. Теоретические основы расчета страховых тарифов.Актуарные расчеты