Скорость произвольной точки звена манипулятора
Для того, чтобы воспользоваться уравнениями Лагранжа-Эйлера, необходимо знать кинетическую энергию рассматриваемой физической системы, а следовательно, и скорости всех её точек.
Рассмотрим произвольную точку, неподвижную относительно i-го звена и заданную в системе координат i-го звена однородными координатами  (рис. 9.2):
(рис. 9.2):
 . (9-10)
. (9-10)
Обозначим через 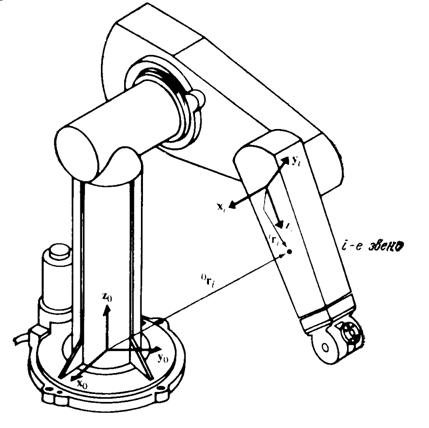 координаты этой же точки относительно базовой системы координат. Матрица
координаты этой же точки относительно базовой системы координат. Матрица  обозначает матрицу преобразования однородных координат, определяющую пространственное положение системы координат i-го звена относительно системы координат (i-1)-го звена, а
обозначает матрицу преобразования однородных координат, определяющую пространственное положение системы координат i-го звена относительно системы координат (i-1)-го звена, а  -матрицу, определяющую связь между системой координат i-го звена и базовой системой координат.
-матрицу, определяющую связь между системой координат i-го звена и базовой системой координат.

Рисунок 9.2. Точка i-го звена
Тогда связь между  и
и  определяется соотношением:
определяется соотношением:
 , (9-11)
, (9-11)
где  . (9-12)
. (9-12)
Если i-е сочленение – вращательное, то матрица  имеет вид:
имеет вид:
 , (9-13)
, (9-13)
Если i-ое сочленение – поступательное, то матрица имеет вид:
 .
.
В общем все ненулевые элементы матрицы являются функциями величин  и
и  , причём в зависимости от типа j-го сочленения
, причём в зависимости от типа j-го сочленения  или
или  представляет собой присоединенную переменную этого сочленения, а остальные величины – известны (задаются конструкцией манипулятора). В выводах уравнений движения, как вращательных, так и поступательных, используется обобщённые координаты
представляет собой присоединенную переменную этого сочленения, а остальные величины – известны (задаются конструкцией манипулятора). В выводах уравнений движения, как вращательных, так и поступательных, используется обобщённые координаты  ,
,  , если i-е сочленение – вращательное и
, если i-е сочленение – вращательное и  , если i-е сочленение – поступательное).
, если i-е сочленение – поступательное).
Скорость точки  относительно базовой системы координат (при
относительно базовой системы координат (при  ):
):
 . (9-15)
. (9-15)
Частные произведение матрицы  по переменным
по переменным  легко вычисляется с помощью матрицы
легко вычисляется с помощью матрицы  , которая для вращательного сочленения имеет вид:
, которая для вращательного сочленения имеет вид:
 , (9-16а)
, (9-16а)
а для поступательного сочленения:
 . (9-16б)
. (9-16б)
Используя эту матрицу, можно написать:
 . (9-17)
. (9-17)
Например, для манипулятора с вращательными сочленениями  .
.
Таким образом, для 
 (9-18)
(9-18)
По смыслу равенство (9-18) описывает изменение положения точек i-го звена, вызванное движением в j-м сочленении манипулятора. Для упрощения формул введём обозначение  , с учетом которого равенство (9-18) можно представить для
, с учетом которого равенство (9-18) можно представить для  :
:
 (9-19)
(9-19)
Используя введённое обозначение, формулу для  можно записать в форме:
можно записать в форме:
 . (9-20)
. (9-20)
Определяем величину, характеризующую эффект взаимодействия сочленений:
 (9-21)
(9-21)
Например, для манипулятора вращательными сочленениями при  и
и  имеем:
имеем:
 .
.
Еще по теме Скорость произвольной точки звена манипулятора:
- Скорость точки
- § 3. Состав и структура суда среднего звена, полномочия структурных подразделений судов этого звена
- Вращательное движение. Равномерное движение точки по окружности. Вектор угловой скорости. Угловое ускорение. Связь угловых и линейных величин
- Кинематическая энергия манипулятора
- Пример: двухзвенный манипулятор
- Теорема 31. Седьмое правило. Если В и А движутся по одному направлению, А медленнее, а В, следуя за ним, быстрее, так что, наконец, тело В нагоняет А, и если при этом А больше В, но избыток скорости В больше избытка величины А, то В перенесет на А столько своего движения, что после этого оба тела будут двигаться с равной скоростью и в том же направлении. Ио если бы излишек величины А был больше излишка скорости В, то В было бы отражено телом А в противоположном направлении, но удержало бы при э
- Теорема 27. Третье правило. Если два тела равны по массе, но В движется немного скорее А, то не только А отразится в противоположном направлении, но и В перенесет на А половину своего излишка скорости, и оба будут продолжать движение с равной скоростью в одном направлении.
- Планирование траекторий манипулятора
- Теорема 24. Первое правило. Если два тела, например А и В (см. фиг. 1), вполне равны друг другу и движутся друг к другу с равной скоростью, то при встрече их каждое отразится в противоположную сторону, не теряя своей скорости.
- Приложение 2 1. Экспериментальная установка - упругий манипулятор FLEBOT-II.
- Динамика манипулятора
- Теорема 26 Если тела различны, как по своей массе, так и по скорости, именно В вдвое больше А (см. фиг. 1), но движение А вдвое скорее В, а в остальном все остается по-прежнему, то оба тела отразятся в противоположном направлении и каждое удержит прежнюю скорость.
- Кинематика манипулятора
- Управление манипуляторами промышленного робота
- Оцените значимость поддержки со стороны менеджеров среднего звена.
- Потенциальная энергия манипулятора
- Уравнение движения манипулятора
- Определение различных конфигураций манипулятора
- Уравнения движения манипулятора с вращательными сочленениями
- Теорема 21 Если тело А вдвое больше тела В и движется с такой же скоростью, то тело А будет иметь вдвое больше движения, чем В, или вдвое больше силы, чтобы удержать равную с В скорость (см. фиг. 1).